Raus aus der Kiste
3D-Kamera zum Einlagern von Verpackungen
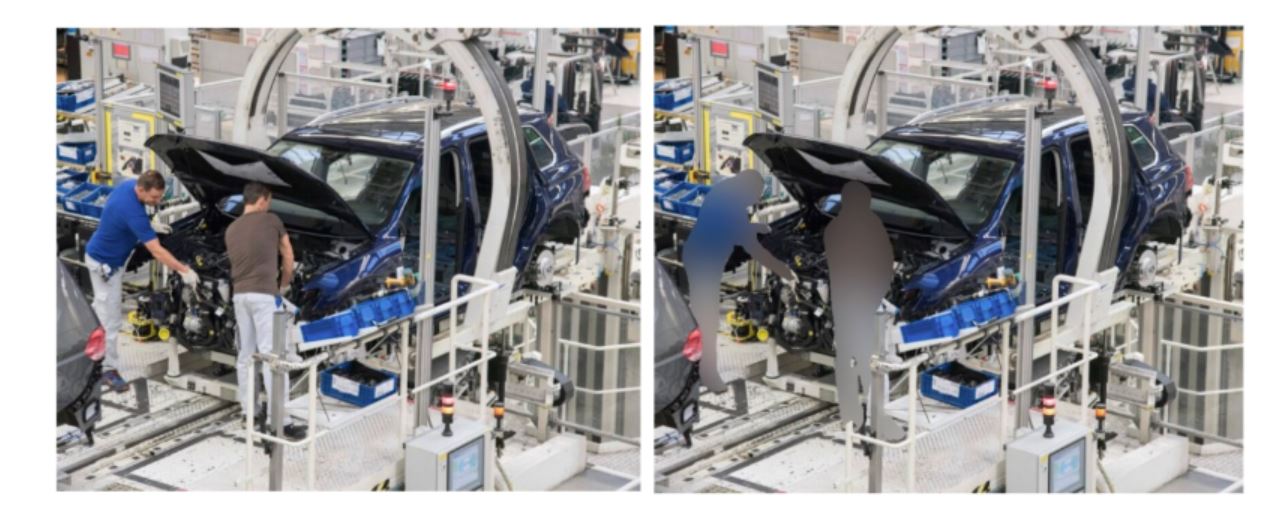
Eine schnelle und zuverlässige Teileerkennung mittels 3D-Bildverarbeitung ist die Grundlage, um Handhabungsprozesse mit dem Roboter zu lösen. So integriert die Magazino GmbH eine 3D-Stereokamera in Kommissionier-Automaten, um chaotisch liegende Verpackungen direkt aus der Kiste zu holen und automatisiert einzulagern.
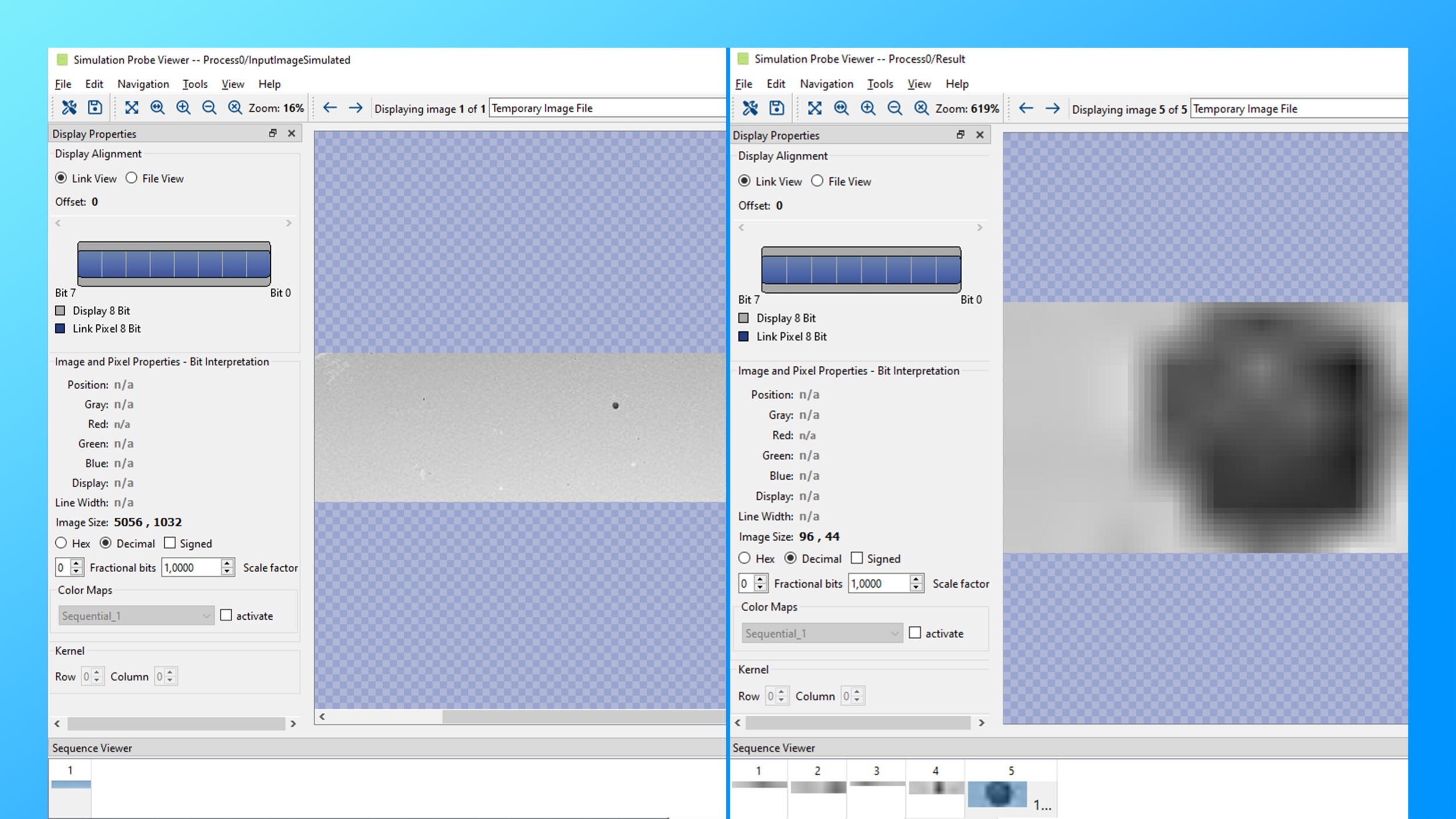
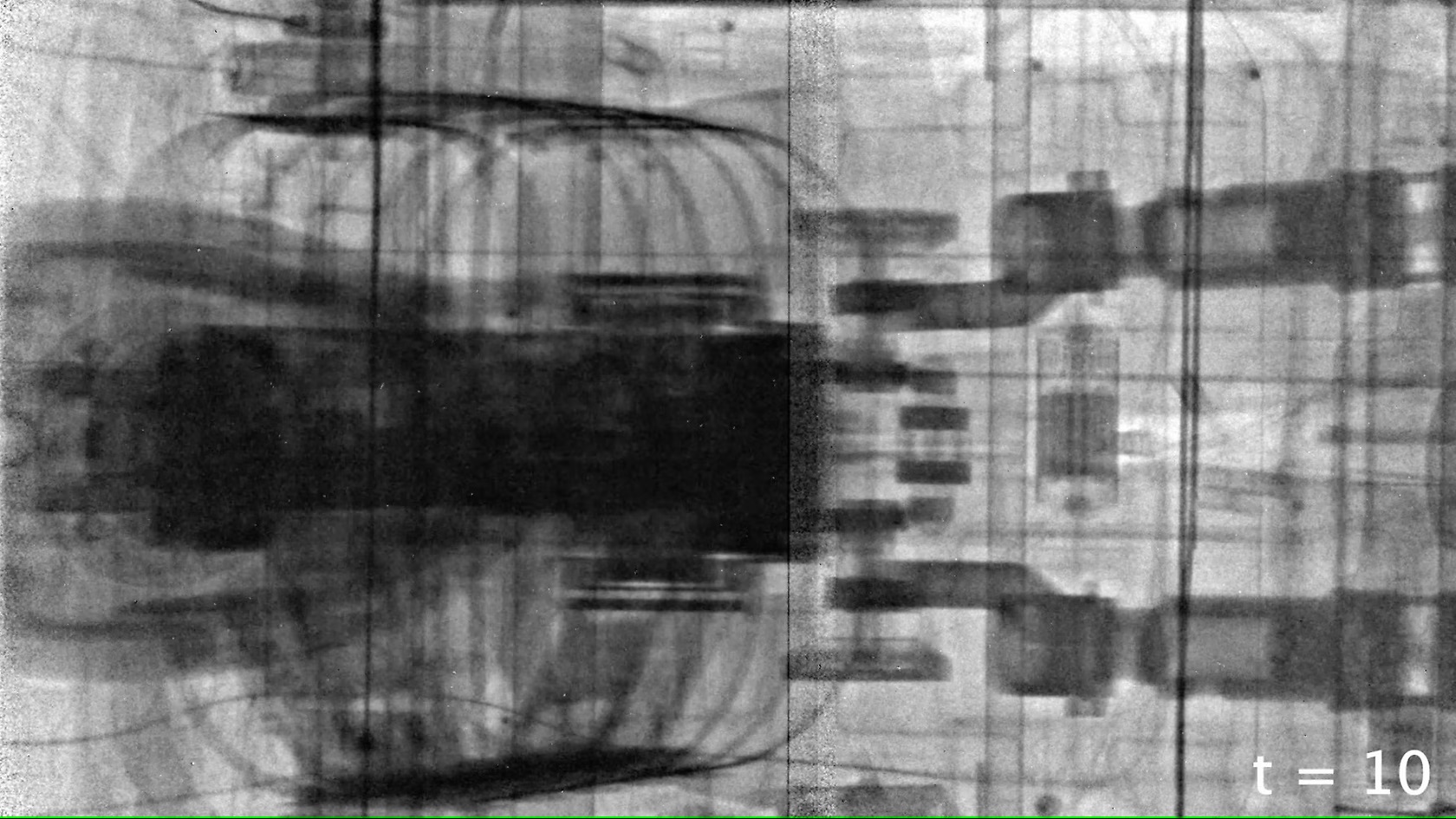
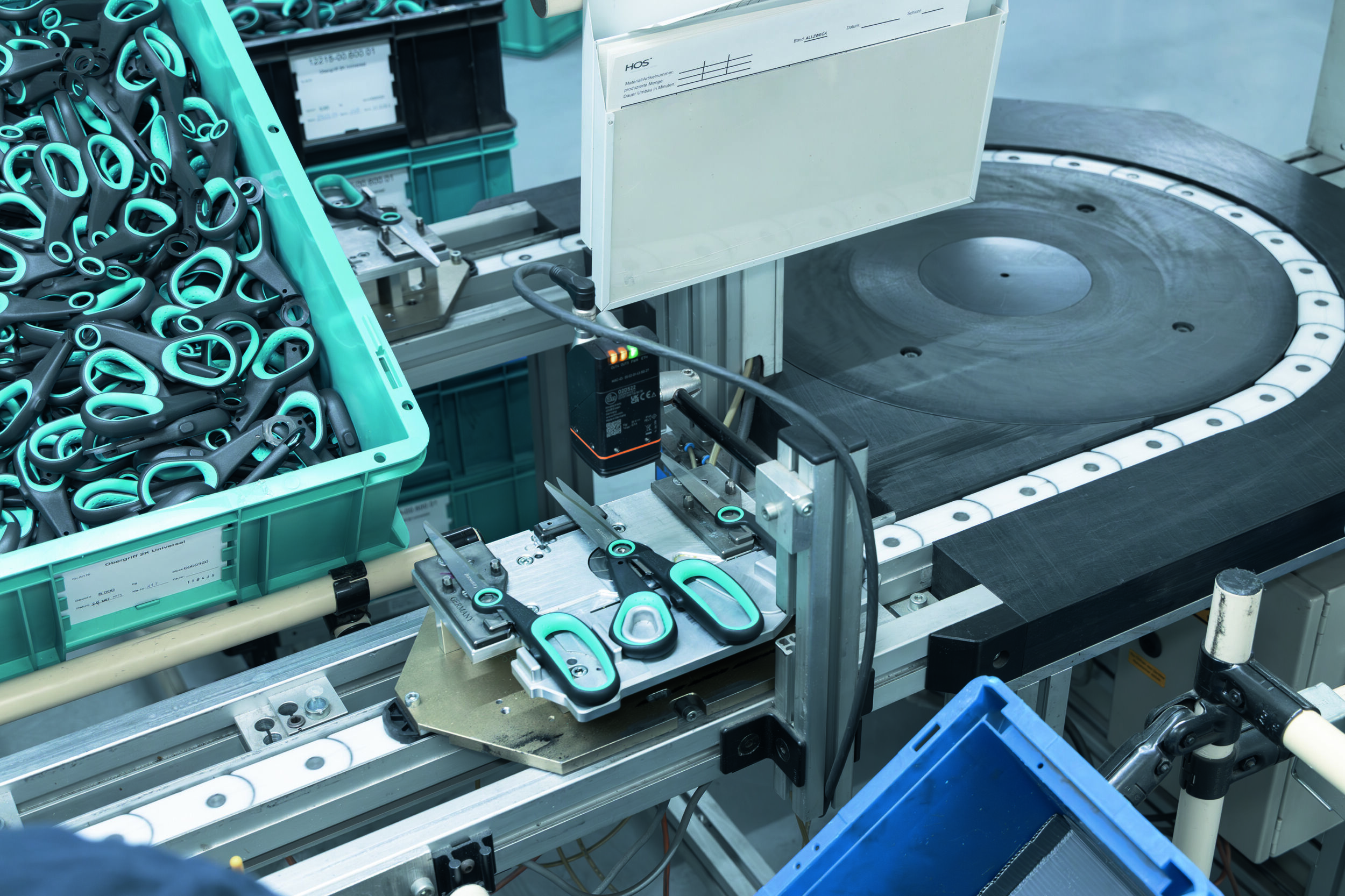
Das Unternehmen mit Sitz in München entwickelt und baut Roboterlösungen für Lager- und Logistikanwendungen sowie platzsparende Pick&Place-Systeme. Die Lösungen ermöglichen eine hocheffiziente, stückgenaue Ein- und Auslagerung bei hoher Artikelvielfalt. Im Herbst letzten Jahres präsentierte Magazino mit dem Kommissionier-Automaten Maru ein völlig neues Konzept für Apotheken, das die Lagerung von bis zu 15.000 Arzneimittelverpackungen auf einer Fläche von nur 7qm ermöglicht. Im Vergleich zum üblichen Regallager sind das bis zu 80% mehr Verpackungen pro Quadratmeter. Erreicht wird diese effiziente Raumausnutzung durch die Lagerung auf runden Scheiben, was zudem für kurze Auslagerungszeiten sorgt. Die Packungen werden nach der Höhe sortiert auf Scheiben mit unterschiedlichen Abständen gelagert. Der Automat benötigt deutlich weniger Fläche als das klassische Schubladensystem und spart erheblich Zeit bei der Einlagerung der Medikamente. Das System kann zudem Packungen direkt aus der vom Großhändler angelieferten Kiste übernehmen und erkennt dabei Barcodes und Verfallsdaten selbstständig. Eine innovative Kameratechnik und Greiftechnologie machen es möglich. Mittels Sauggreifer werden die chaotisch in der Kiste liegenden Verpackungen entnommen. Die Steuerung erfolgt auf Basis von 3D-Bildern, die von einer Stereokamera erfasst werden. „Alternativ könnte das auch mit Streifenlichtsensoren gelöst werden, die aber deutlich teurer sind, oder mit Sheet-of-light-Sensoren, wobei aber dort der Sensor zunächst über die Kiste bewegt werden müsste, um ein komplettes 3D-Bild zu liefern,“ so Nikolas Engelhard, Entwicklungsleiter Software bei Magazino. „Wir haben uns daher für eine Ensenso N10 Stereo-3D-Kamera von IDS entschieden.“ Die Kamera integriert nicht nur zwei Global Shutter CMOS-Sensoren und eine Software in einem kompakten Gehäuse, sondern auch einen Texturprojektor. Dieser wirft ein zufälliges Punktmuster auf das aufzunehmende Objekt, womit auf dessen Oberfläche nicht oder schwach vorhandene Strukturen ergänzt bzw. hervorgehoben werden. Denn für das Stereo-Matching werden prägnante Stellen im Bild benötigt. Das Objekt wird dann von den beiden Bildsensoren entsprechend des Stereo-Vision-Prinzips erfasst und mittels der geometrischen Zusammenhänge der Triangulation werden schließlich für jeden Bildpunkt die 3D-Koordinaten rekonstruiert bzw. berechnet. Selbst bei relativ homogene Bauteilen lässt sich so ohne zusätzlichen technischen Aufwand und in wenigen Millisekunden ein praktisch lückenloses, vollflächiges und detailreiches 3D-Bild generieren. Erhältlich ist die Kamera sowohl mit USB2.0 als auch mit GigE-Anschluss, wobei Magazino das USB-Modell N10 einsetzt. Trotz der beiden Sensoren und des eingebauten Projektors misst die Kamera nur ca.150x45x45mm und wiegt kaum 400g.
Richtige Griffposition dank 3D-Punktewolke
Im Kommissionier-Automat wird die Stereokamera an eine zentrale Position vergleichsweise nah über der zu entleerenden Großhandelskiste gefahren, von wo aus sie den Kisteninhalt erfasst. Die Möglichkeit, das Blickfeld der Ensenso an die Anwendung (Abstand zur Kiste, Kistengröße) anzupassen – bei einem möglichst geringem Mindestabstand – war ein wesentliches Entscheidungskriterium für Magazino. „Der Automat soll insgesamt ja so kompakt wie möglich sein. Die komplette Einlagerung ist unter einem Tisch mit einer Arbeitshöhe von 1,1m installiert. Die Großhandelskiste hat eine Höhe von etwa 20cm, aus der wir auch Packungen mit einer Höhe von bis zu 15cm greifen wollen. Dadurch kann kein klassisches Achssystem eingesetzt werden“, so Engelhard. Aus der von der 3D-Kamera gelieferten Punktwolke werden anschließend Ebenen extrahiert und gute Griffpositionen für den Sauggreifer bestimmt. Dieser holt sich dann die einzelne Verpackung (typische Größe 100x50x20mm) und legt sie auf einer Messfläche ab, wo die genauen Abmessungen bestimmt werden; die Höhe der Verpackung z.B. ist in der Kiste nicht messbar. Die exakten Maße werden aber benötigt, um den idealen Lagerplatz für jede Schachtel zu bestimmen. Darüber hinaus wird ein Referenzbild mit einer 2D-Kamera aufgenommen, mit dem die Packung später im Scheibenlager lokalisiert werden kann, z.B. um den Greifer nachzuführen oder um eine vollautomatische Inventur durchzuführen. Dann wird die Packung erneut gegriffen und vor eine Beleuchtungseinheit gehalten, um den Barcode und das eingeprägte Verfallsdatum zu lesen. Um das geprägte Relief hervorzuheben, werden durch mehrere, einzeln angesteuerte LED-Schlagschatten aus verschieden Richtungen erzeugt, die dann kombiniert werden. Schlussendlich wird die Verpackung auf einer Pufferscheibe platziert und dort von einem weiteren Sauggreifer zum definierten Lagerplatz gebracht.
SDK speziell für Robot Vision
Im Lieferumfang der Ensenso sind eine Halcon-Schnittstelle und ein Software Development Kit, das für das GigE- und USB-Modell identisch ist, enthalten. Das SDK nutzt auch Magazino, um die Bilddaten mit anderen Programmen innerhalb dieser Applikation auszutauschen. Nikolas Engelhard: „Wir haben mit dem Ensenso-SDK (NxLib Api) eine eigene Schnittstelle in das Robot Operating System (ros.org) geschrieben, die anderen Programmen die Punktwolken zur Verfügung stellt.“ Dank der umfangreichen Softwareunterstützung, die überdies speziell für Robot-Vision-Anwendungen optimiert wurde, gestaltet sich die Integration sehr einfach. Zudem liefert die Kamera metrische 3D-Daten bereits ‚out of the box‘ und kann sofort eingebaut werden. Lediglich der Roboter muss noch zur Kamera kalibriert werden, was mittels einer am Greifer montierten Kalibrierplatte erfolgt. Die Software errechnet daraus die Montageposition der Kamera und die 3D-Daten werden sofort im Koordinatensystem des Roboters repräsentiert.