

Robotik

-

Perfekte Balance
Entgegen dem aktuellen Trend der laufenden, humanoiden Roboter setzt der am Fraunhofer IML entwickelte Evobot auf zwei differentiell angetriebene Räder und einen schlanken Aufbau. Damit wird die komplexe Beinkinematik von humanoiden Robotern vermieden, es muss allerdings nicht auf die Flexibilität von zwei Beinen verzichtet werden. Die Maximalgeschwindigkeit des Antriebs ist dabei in der aktuellen Prototypen-Konfiguration…
-

IFR: Forschung und Investitionen weltweit
Die International Federation of Robotics analysiert mit dem Report World Robotics R&D Programs 2025 zum vierten Mal offizielle Förderprogramme für Robotik in 13 Ländern in Asien, Europa und Amerika.
-
IFR: Forschung und Investitionen weltweit
Die International Federation of Robotics analysiert mit dem Report World Robotics R&D Programs 2025 zum vierten Mal offizielle Förderprogramme für Robotik in 13 Ländern in Asien, Europa und Amerika.
-
IFR: Forschung und Investitionen weltweit
Die International Federation of Robotics analysiert mit dem Report World Robotics R&D Programs 2025 zum vierten Mal offizielle Förderprogramme für Robotik in 13 Ländern in Asien, Europa und Amerika.
das könnte sie auch interessieren



-
 Bild: VDMA e.V. / VDA e.V.
Bild: VDMA e.V. / VDA e.V.
-
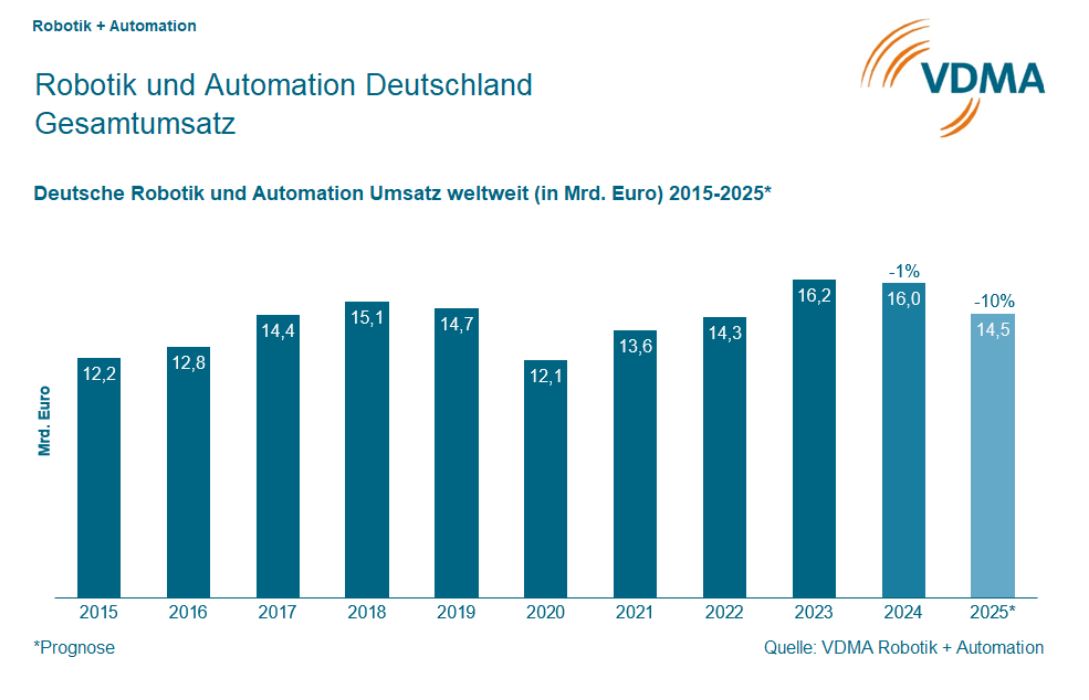
 Bild: VDMA e.V.
Bild: VDMA e.V.
-
 Bild: TeDo Verlag GmbH
Bild: TeDo Verlag GmbH
-
 Bild: ©eugen_z / Beumer Maschinenfabrik GmbH & Co. KG
Bild: ©eugen_z / Beumer Maschinenfabrik GmbH & Co. KG
