Lokalisierung biegeschlaffer Bauteile durch 3D-Stereovision
Die autonome Handhabung biegeschlaffer Bauteile mit Robotern erfordert sowohl die genaue Lokalisierung als auch die Berücksichtigung von Verformungen. Das ISW forscht an einem Ansatz der 3D-Stereovision mit einem Simulationsmodell kombiniert, um eine Lokalisierung auch bei starken Verformungen und Konfigurationsänderungen des Bauteils zu ermöglichen.
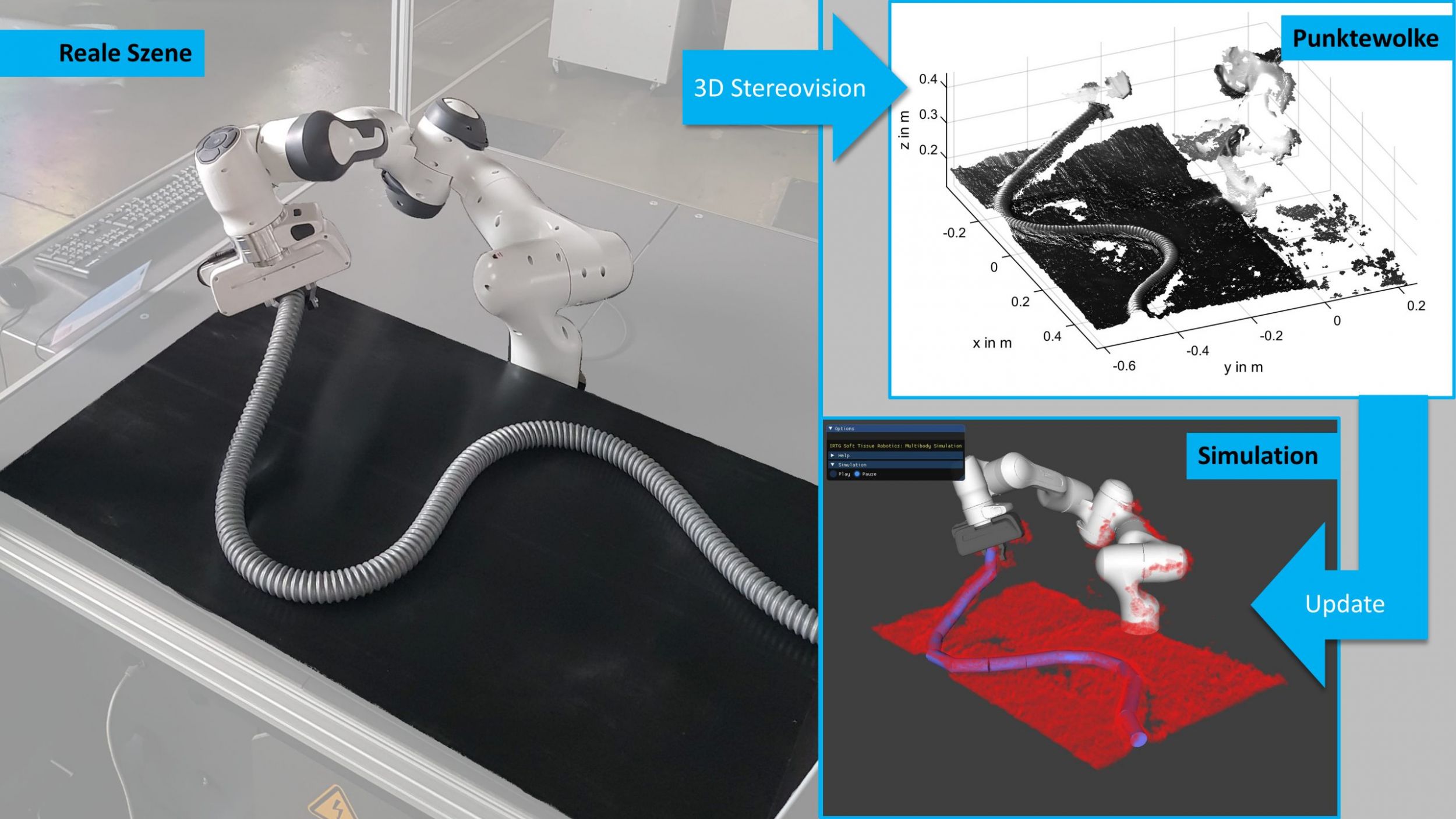
Bild: Universität Stuttgart, ISW









