")
(Bild: ifm electronic gmbh)
Selbständige Navigation
Das Einzigartige am Bakus ist die eigenständige Navigation und Hinderniserkennung. Dafür ist das Fahrzeug mit acht präzisen 3D-Kameras von ifm ausgestattet: je zwei Kameras vorne, hinten und an den Seiten. Cédric Bache erklärt: „Die 3D-Kameras nutzen Lichtlaufzeitmessung und können die Umgebung dreidimensional erfassen. Mit unserer eigens entwickelten Software können wir anhand der übermittelten Bilddaten die Umgebung um das Fahrzeug herum abbilden. Die Software bietet uns eine doppelte Funktion: Zum einen ermöglicht sie die selbständige Navigation durch die Reihen von Reben, zum anderen können wir Hindernisse erkennen und das Fahrzeug vor diesem Hindernis rechtzeitig anhalten. Um unsere Maschine sicher zu navigieren, brauchen wir Sensoren, die Tag und Nacht sehen können. Wir haben mit LIDAR-basierten Systemen experimentiert, aber diese brachten sehr viele Einschränkungen. Andere Lösungen waren zu teuer, um sie auf den Markt zu bringen. Auch haben wir Lösungen auf der Basis von Standardkameras getestet. Auch damit gab es Probleme: Am Tag mit zu viel Helligkeit, in der Nacht mit zu wenig Licht. Wir wollten eine Lösung, die Tag und Nacht zuverlässig funktioniert. Deshalb haben wir uns für die 3D-Kamera von ifm entschieden. Ihr Bildsensor liefert unabhängig von den Lichtverhältnissen ein deutliches 3D-Bild der Umgebung.“ Kernstück des Systems ist ein 3D-Kamerachip von ifm. Er erzeugt mittels PMD-Technologie (Photo-Misch-Detektor) ein 3D-Bild. Die Auflösung des PMD-Bildsensors beträgt 176×132 Pixel. Zu jedem einzelnen der 23.232 Bildpunkte liefert die Kamera einen präzisen Abstandswert bis zu 25 mal pro Sekunde. Durch die verwendete PMD-Technik arbeitet der Bildsensor losgelöst vom Umgebungslicht, das heißt sowohl bei direkter Sonneneinstrahlung als auch bei völliger Dunkelheit erzeugt die Kamera ein 3D-Bild.
")
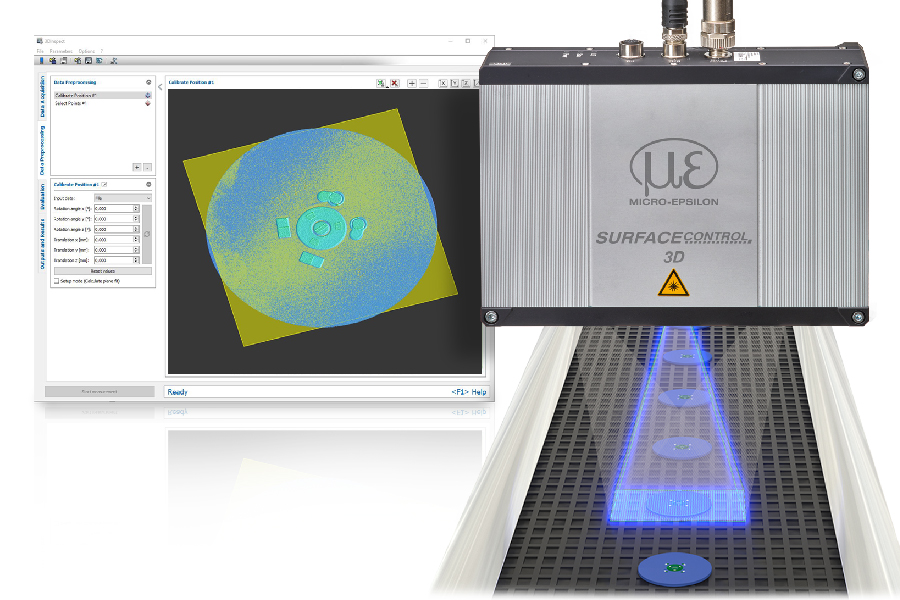
(Bild: ifm electronic gmbh)
3D-Bild per Software auswerten
Herzstück des Bakus ist der Auswertealgorithmus, der aus den acht 3D-Kamerabildern eine virtuelle 360°-3D-Szenerie generiert. Damien Legrand, Produktmanager 3D Vision bei ifm: „Jede Kamera erzeugt eine 3D-Punktewolke der Szenerie in ihrem Blickfeld. In komplexen Algorithmen wird aus den Punktwolken ein virtuelles Abbild der Szenerie geschaffen, welches das direkte Umfeld um das Fahrzeug abbildet, also z.B. die Reben oder andere Gegenstände. Dieses Bild wird dann zur autonomen Navigation des Fahrzeugs zwischen den Reihen mit den Weinreben und für das Wendemanöver jeweils am Ende der Reihen genutzt“. Letztendlich bedeutet der Einsatz des Roboters einen erheblichen finanziellen Gewinn für den Winzer, da er die Betriebskosten an einer Rebe bei den meisten mechanischen Arbeiten um das vierfache senkt. n @Kontakt_FA: