Roboter mit Augenmaß
Intuitives Zusammenspiel Roboter und Vision Sensor
Was für eine menschliche Hand in der Regel kein Problem darstellt, kann einen Roboter leicht überfordern, z.B. ein elektronisches Bauteil passgenau in die vorgestanzten Löcher einer Platine zu stecken. Mit Unterstützung eines neuem Vision Sensors und einer intuitiv bedienbaren Programmiersoftware gelingt es jetzt, dem Roboter das nötige Augenmaß beizubringen.
")
Bild 1 | Mithilfe des Vision Sensors Visor und eines Kraft-Momenten-Sensors im Greifer ist der Roboter
in der Lage, auch sensible Bauteile fehlerfrei in die gewünschte Position zu bringen. (Bild: ArtiMinds Robotics)
Das Positionieren von Bauteilen, etwa das passgenaue Platzieren von Schrauben, die Montage von Clips oder das Auftragen von Klebern, ist für moderne Handling-Roboter prinzipiell kein Problem mehr. Zunehmend werden sie daher auch für anspruchsvolle Montageaufgaben eingesetzt, die bisher dem Menschen vorbehalten waren. Eine Herausforderung für den Roboter sind dabei aber die typischen Unsicherheiten der realen Welt. Ist ein aufzugreifendes Bauteil z.B. nicht exakt gleich hinsichtlich Form oder Position wie das vorhergehende, scheitert er oder richtet Schaden an. Um auch Werkstücke mit Fertigungstoleranzen oder in wechselnden Lagen aufgreifen zu können, benötigt der Roboter Augen – in der Regel übernimmt diese Funktion ein Bildverarbeitungssystem, wie z.B. ein Vision Sensor. Damit ist es beispielsweise kein Problem mehr, wenn das Gehäuse des aufzunehmenden elektronischen Bauteils leicht verformt ist, sodass die Pins nicht präzise mittig stehen; der Roboter kann das Teil trotzdem korrekt greifen und kontaktieren. Damit empfindliche Teile beim Greifen und Bestücken nicht beschädigt werden, wird der Robotergreifer außerdem mit einem Kraft-Momenten-Sensor ausgestattet, der Druckkräfte und Drehmomente an die Steuerung übermittelt.
")
Bild 2 | Bewegungsabläufe des Roboters werden bei ArtiMinds RPS aus vorkonfigurierten Bausteinen per Drag&Drop zusammengestellt. (Bild: ArtiMinds Robotics)
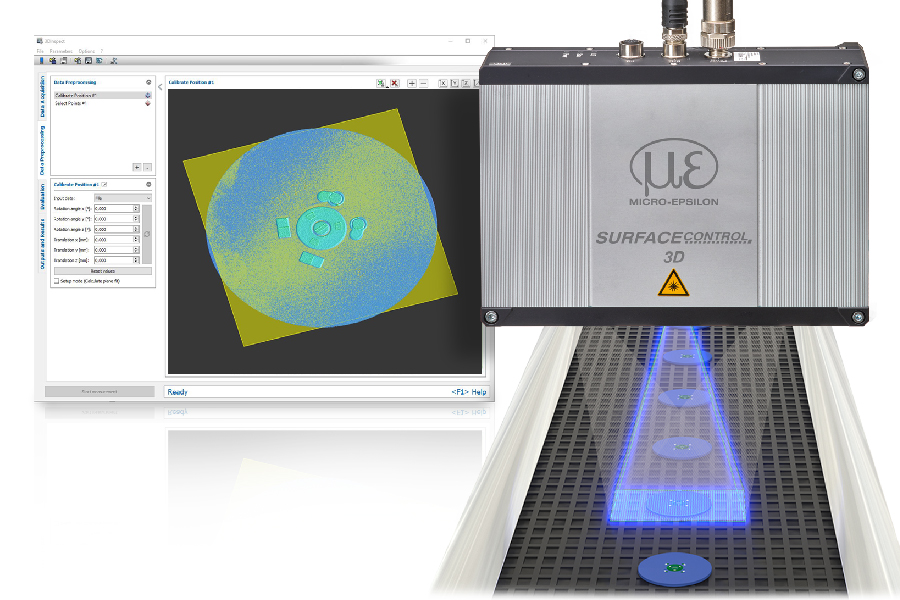
Teileerfassung mit Vision Sensor
In der beschriebenen Anwendung erhält der Roboter die benötigten visuellen Daten über seine Umgebung von einem Vision Sensor der Reihe Visor. Der kompakte Sensor mit integrierter Beleuchtung bietet sämtliche Funktionen, die für eine zuverlässige Erfassung von Objekten benötigt werden. Dazu gehören verschiedene Algorithmen (z.B. Konturerkennung, Mustervergleich und Blob), eine leistungsfähige Lagenachführung sowie spezielle Roboterfunktionen wie Greifer-Freiraumprüfung und Greifpunkt-Offset, die das sichere Aufnehmen nah aneinander liegender Teile bzw. das außermittige Greifen von Teilen ermöglichen. Mit seiner Bildauflösung von 1,3MP ermöglicht der Sensor außerdem eine Detektion aus größerem Abstand zum Prozess bzw. von großen Bauteilen. Trotz seiner vielseitigen Funktionalität lässt sich das Gerät einfach einrichten. Zur Konfiguration benötigt der Anwender keine spezifischen Bildverarbeitungskenntnisse. Mit einigen Mausklicks in der zugehörigen Software SensoConfig lässt sich die Konfiguration schnell an wechselnde Teilearten und -formen sowie unterschiedliche Umgebungsbedingungen anpassen.