Stereovision
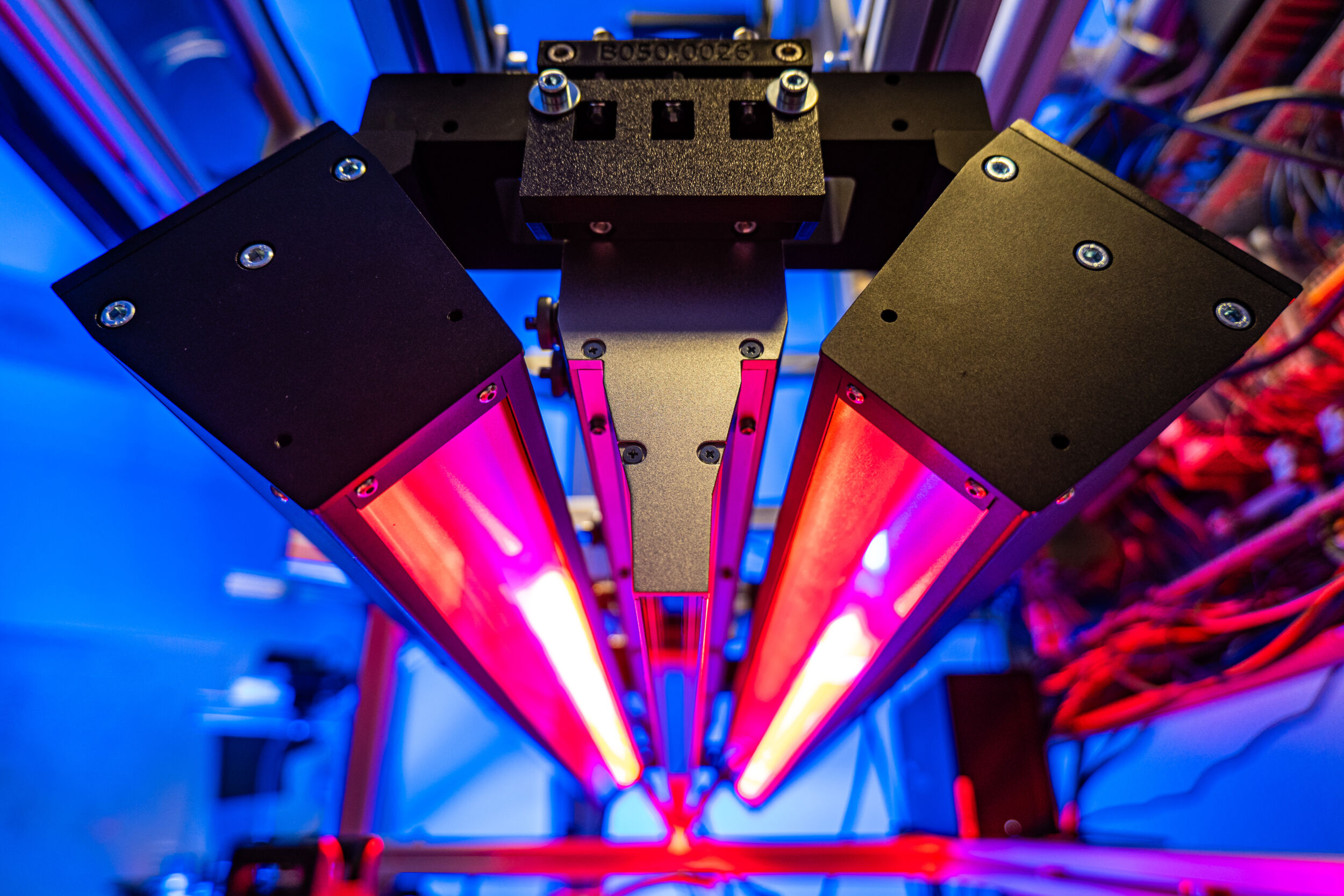
Bei Stereovision-Systemen wird die Tiefeninformation analog zum menschlichen Sehen mit zwei Augen aus zwei Bildern gewonnen, die von zwei in einem bekannten Abstand zueinander installierten Kameras zeitgleich aufgenommenen werden. Aus dieser Vorgehensweise resultieren Bildpaare der aufgenommenen Szene, in denen sich zueinander gehörende Bildbereiche per Mustererkennung identifizieren lassen. Da das gleiche Objekt in beiden Bildern an unterschiedlichen Positionen abgebildet ist, ergibt sich bei bekannter Aufnahmegeometrie die Entfernung zum 3D-Sensor.
Stereovision ist prinzipiell ein passives Verfahren, da die Szene nicht beleuchtet werden muss. Das Verfahren eignet sich sehr gut für große Szenen und auch für Aufnahmen im Außenbereich. Nachteil ist zum einen die benötigte Rechenleistung. Das Auffinden der zueinander gehörenden Bildpunkte in jedem Bildpaar macht Stereovision zu einem sehr rechenintensiven Verfahren. Bei vielen Aufgabenstellungen, wie beispielsweise in der Roboter-Navigation, ist die Echtzeitfähigkeit jedoch eine wichtige Voraussetzung, die sich durch den Einsatz von spezieller Hardware realisieren lässt.
So ermöglichen z.B. die Embedded 3D-Bildverarbeitungssysteme Scarlet, SceneScan und SceneScan Pro von Nerian mit Hilfe eines FPGA und eines Stereo-Algorithmus ein schnelles Echtzeit-Stereomatching der aufgenommenen Bilddaten, die anschließend als 3D-Punktewolke, Tiefenkarte oder 2D-Kameradaten zur weiteren Verarbeitung an das PC-System übertragen werden können.
Prinzipbedingt eignen sich Stereovision-Systeme nicht gut bei homogenen Oberflächen, wo die Software aufgrund der fehlenden Struktur keine Merkmale in den Bildpaaren erkennen und verknüpfen kann. Somit lassen sich für diese Regionen keine Entfernungen berechnen. Durch den Einsatz von Struktur-erzeugenden Methoden wie beispielsweise einem Random-Dot-Projektor existieren jedoch Optionen, um Stereovision auch in eigentlich für diese Technologie schwierigen Fällen anzuwenden.