The solution consists of a robotic arm, a turntable and a scanning system that can be operated even by non-specialists. Intelligent algorithms control the process and adapt it dynamically so that maximum surface coverage is achieved with as few camera positions as possible – without any teaching of the robot. This results in high-quality 3D models without manual post-processing.
Hard- & Software
A PhaseOne iXH 150MP camera with a ring light is used for colour-accurate capture. A Universal Robots UR10 or UR20 and a turntable are used as positioning devices. The arm is used to capture all visible surfaces of the object. Safety precautions are implemented in both the hardware (in the event of a power failure, brakes lock the robot’s joints) and the software. The control system ensures that the robot does not collide with the object. In combination with the turntable, this also prevents the arm from having to reach over the object. The system is available in two mobile versions: a compact version with a turntable for objects weighing up to 100kg and a larger version that captures objects with a diameter of up to 1m and a height of 2m. A virtual 3D operating environment shows the user all simulated or planned process steps.The key feature of the solution is a dynamic approach to view planning, which guarantees an optimal number of positions for the capture camera, taking into account photogrammetric requirements. During the process, view planning analyses all images for sharp image areas. Only these image regions are used for 3D reconstruction. The software successively determines the next positions and orientations of the robot and camera. It displays planned views as a green overlay on the interim results of the 3D reconstruction. In addition, the robot paths from one position to the next are calculated.
Operation and process steps
After setting up the system, calibration targets are used to determine camera intrinsics and robot arm sensor transformation. The turntable is then calibrated and the colour properties of the camera are measured. The system uses photogrammetry as a method for reconstructing 3D models from high-resolution images. Structure-from-motion and multi-view stereo identify features and triangulate 3D information. Typical resolutions are between 10 and 15µm. Capturing all images is usually faster than the final high-precision 3D reconstruction, which can take several hours. During this time, another object is captured. In the scanning process, low-resolution 3D models are used as previews to make decisions about view planning based on these 3D models.
Intelligent view planning instead of teaching
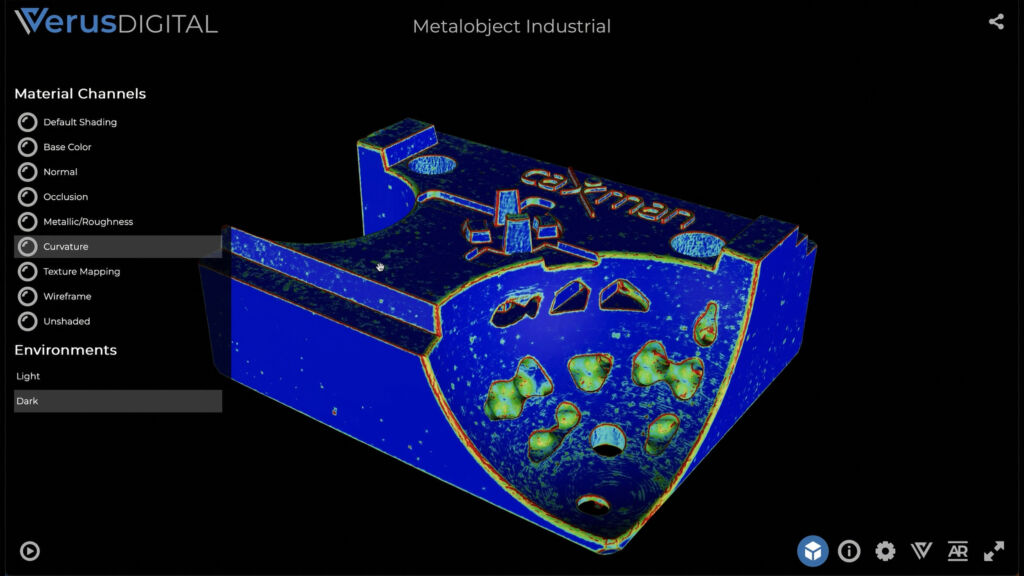
Once the user has positioned the object on the turntable and, if necessary, adjusted the default value for the diameter and height of the object in the system, the robot works autonomously. The user does not need to guide the robot arm around the object, define stopping points or program before scanning. View planning maximises model quality and minimises the number of images. The incremental method uses a feedback process consisting of planning, capture and reconstruction, with intermediate reconstructions forming the basis for further planning. A key challenge was to develop a quality metric that would allow the final model quality to be determined during the scan. Point density has been empirically proven to be a suitable metric.Starting with a quick scan of 40 images, an initial rough 3D reconstruction is performed. View planning contin-uously analyses the point density throughout the process. In Image 3, sparsely populated areas are marked in red and dense regions in blue for illustration purposes. New camera positions are then planned. The robot contin-ues scanning while the reconstruction is continuously updated and new camera positions are planned. This process is repeated until the desired surface density is achieved. At the end of the process, the final 3D model is avail-able for visualisation and analysis without any manual post-processing.