Kollmorgen ist ein international tätiges Unternehmen, das auf Antriebstechnik und Automatisierungslösungen spezialisiert ist. In Mölndal in der Nähe von Göteborg befindet sich das Innovations- und Entwicklungszentrum für mobile Robotik und Fahrzeuge in der Logistik. Dort entwickelt die Firma für führende Hersteller von fahrerlosen Transportsystemen (Automated Guided Vehicles, AGV) und autonomen mobilen Robotern (Autonomous Mobile Robots, AMR) eine umfassende Automatisierungsplattform. Diese reicht von Fahrzeugsoftware und Hardware über Werkzeuge für die Inbetriebnahme bis hin zu Systemen für das Flottenmanagement. Im firmeneigenen Testzentrum werden neue Funktionen unter realen Bedingungen geprüft und optimiert. Dies bietet die ideale Umgebung, um gemeinsam mit IFM eine kamerabasierte Lösung zur dynamischen Lastaufnahme zu entwickeln.
Präzision in Mensch-RoboterUmgebungen
Viele Warenlager setzen heute parallel auf AGVs, AMRs und manuelle Prozesse. Wo Menschen Paletten absetzen und Fahrzeuge sie später aufnehmen sollen, entscheidet Präzision über Effizienz. In klassisch starren Systemen müssen Paletten exakt in einem definierten Feld platziert werden, Abweichungen führen zu Stillständen oder manueller Nacharbeit. „Dabei sind Fahrzeuge auf Präzision angewiesen, und da ist der menschliche Faktor nicht immer zuverlässig genug“, beschreibt Johan Loebbert, Application Engineer, Kollmorgen AMS, die Ausgangslage in starren Systemen. Typische Problempunkte reichen vom Entladen eines LKW im Wareneingang bis zur Übergabe von Paletten in Pufferzonen. Der ideale Abstellort ist dort oft belegt, Markierungen sind verschlissen, Winkel und Tiefen variieren. Das Ergebnis sind Verzögerungen im Materialfluss. Gleichzeitig steigt der Druck, heterogene Flotten skalierbar zu betreiben, ohne die Prozesssicherheit zu gefährden. Kollmorgen suchte daher eine Lösung, die die Lücke zwischen menschlicher Flexibilität und fahrzeugseitiger Genauigkeit schließt, Ausfälle verhindert und zudem einfach in bestehende Fahrzeugarchitekturen integrierbar ist.

Dynamisches Load Docking
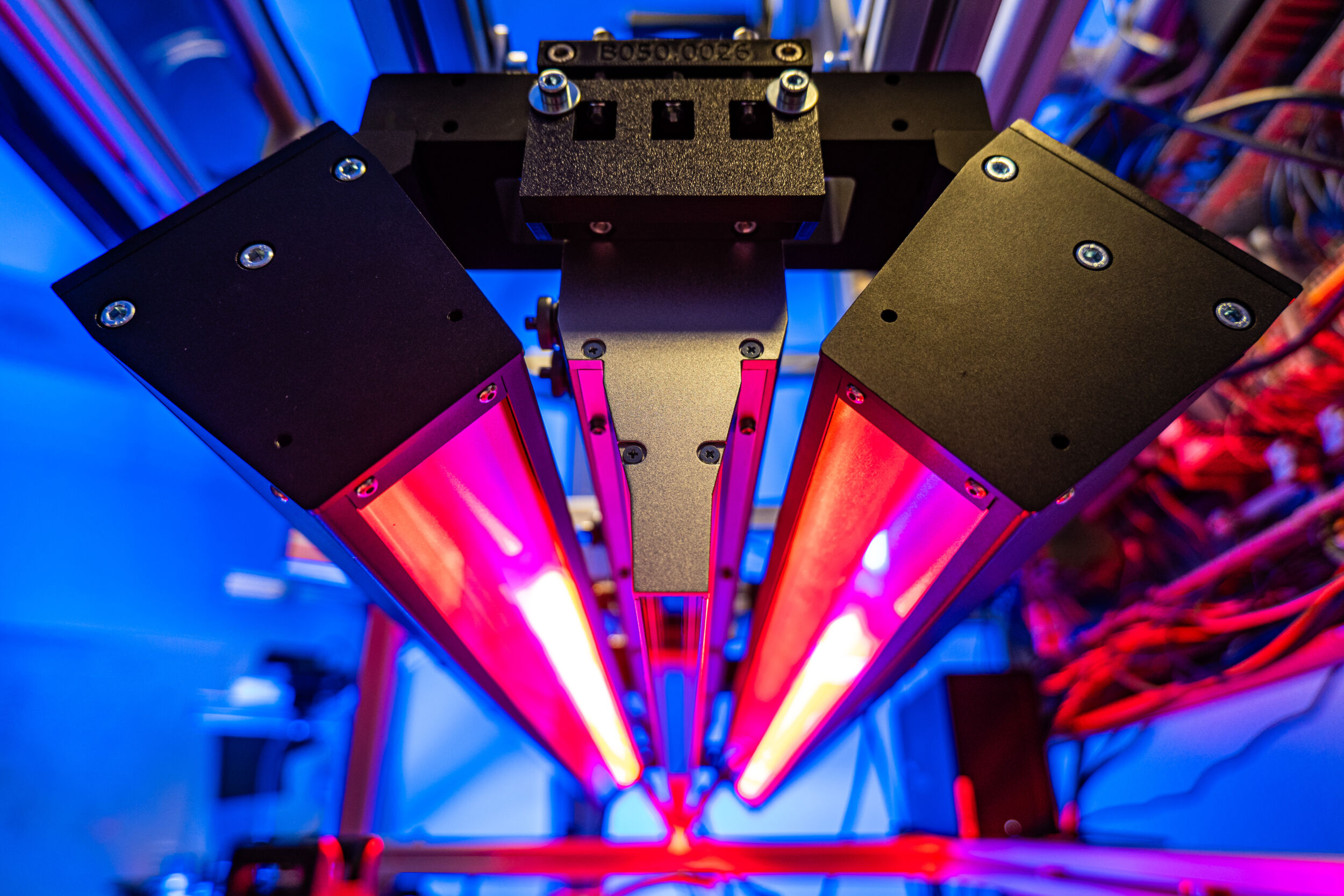
Die Antwort liefert die Kombination aus Kollmorgens Dynamic Load Docking und einem IFM-Kamerasystem mit PDS-Funktionalität (Pallet Detection System). Dynamic Load Docking bezeichnet ein Verfahren, das vor allem bei AGVs eingesetzt wird, um Ladungen präzise aufzunehmen oder abzusetzen, auch während sich das Fahrzeug oder die Ladung noch leicht bewegt. Herzstück ist eine App, die Position, Ausrichtung und Abmessungen einer Palette im Sichtfeld der Kamera erkennt. „In diesem Fall nutzen wir das 3D-Kamerasystem von IFM mit PDS-Funktion in Verbindung mit unserer Lösung für dynamisches Load Docking“, erläutert Johan Loebbert. „Im Wareneingang kann eine Person die Palette in einem allgemeinen Bereich in variabler Position und beliebigem Winkel absetzen. Das AGV nimmt dann später ein 3D-Bild auf, ermittelt die genaue Position und erzeugt eine individuelle Fahrtrajektorie, um die Palette sicher aufzunehmen.“
Der Mehrwert zeigt sich bereits in der Integration: Kamera montieren, an die Fahrzeug-CPU und den Controller anschließen, ein kurzer Kalibriervorgang und etwas Feintuning – fertig. „Die Zusammenarbeit mit IFM war herausragend. IFM hat die PDS-Lösung entwickelt, während wir unser dynamisches Load Docking erprobt haben. Durch kontinuierliches Feedback konnten wir die Funktionalität weiter ausreizen“, resümiert Johan Loebbert.
Kamera-Sensor-Plattform
Die vielseitige Kamera-Sensor-Plattform O3R bildet die Basis für die zuverlässige Palettendetektion an AGVs. Durch die zentrale Verarbeitung von Bild- und Sensordaten in der integrierten Video Processing Unit (VPU) können bis zu sechs 2D/3D-Kameraköpfe synchronisiert betrieben werden, was eine vollständige 360°-Umfelderfassung ermöglicht. Auf dieser Hardware läuft die Software Pallet Detection System, die sämtliche Standard-Palettentypen lageunabhängig und mit hoher Präzision erkennt. Die Kombination aus Recheneinheit, Time-of-Flight-Imager und einer hohen Bildwiederholrate gewährleistet eine robuste und dynamische Objekterkennung, auch unter anspruchsvollen Licht- und Bewegungsbedingungen. Durch die standardisierte Docker-Architektur und die Unterstützung gängiger Entwicklungsumgebungen wie Python, C++, Cuda und ROS lässt sich das System flexibel in bestehende AGV-Steuerungen integrieren.

Mehr Flexibilität, weniger Stillstand
Mit der kamerabasierten Lastaufnahme verschiebt sich der Fokus weg von starren Regeln hin zu robusten, situationsadaptiven Prozessen. Der größte Hebel ist Flexibilität: Paletten müssen nicht mehr in festen Feldern abgestellt werden. Das reduziert Nacharbeit und verkürzt Zykluszeiten in gemischten Zonen, in denen Menschen und Fahrzeuge zusammenarbeiten. Für Betreiber bedeutet das: weniger Blockaden, weniger manuelle Eingriffe, höhere Durchsätze – bei gleichbleibender Sicherheit. Neben dem Prozessnutzen überzeugt die Lösung auch in der Praxis durch eine einfache und schnelle Installation.
Ein weiterer Vorteil entsteht durch die Offenheit der Kollmorgen-Plattform: „Die Zusammenarbeit mit IFM zeigt, wie anpassbar und skalierbar unsere Lösung ist – im Prinzip lässt sich alles in die Plattform integrieren“, erklärt Per Hansson, Partner Channel Coordinator bei Kollmorgen AMS. Für Anwender resultiert daraus Technologie-Souveränität: Die Flotte bleibt erweiterbar, neue Funktionen können stufenweise ergänzt werden. So entsteht aus Sensorintelligenz und Flottenkompetenz ein praxisnahes Gesamtpaket mit spürbarem Mehrwert im Alltag der Intralogistik.