Kleinladungsträger (KLT) unterschiedlichster Größe und Farbe sind in zahlreichen Industriebereichen gang und gäbe. Für ein sicheres und wirtschaftliches Depalettieren solcher Palettenstapel sind flexible Automatisierungssysteme erforderlich, die in der Vergangenheit meist nicht allen Anforderungen der Anwender entsprachen. Die automatisierte Entnahme von KLTs von Paletten mit bekanntem Stapelschema ist heute kein echtes Problem mehr – jedoch bei unbekannten, ständig wechselnden Schemata mit KLT verschiedener Größe, Farbe, Orientierung und Greifposition stoßen herkömmliche Depalettiersysteme schnell an ihre Grenzen. Das 3D-Visionsystem OSC 6D (Object Shape Capture) von VMT Bildverarbeitungssysteme als Basis für Roboter-gestützte Komplettsysteme dient auch zur KLT-Depalettierung. Eine Besonderheit der Lösung besteht darin, dass sie selbst dann mit sehr kurzen Taktzeiten zuverlässig arbeitet, wenn die Stapelschemata unbekannt sind und ständig wechseln.
Formbasiertes Antastverfahren
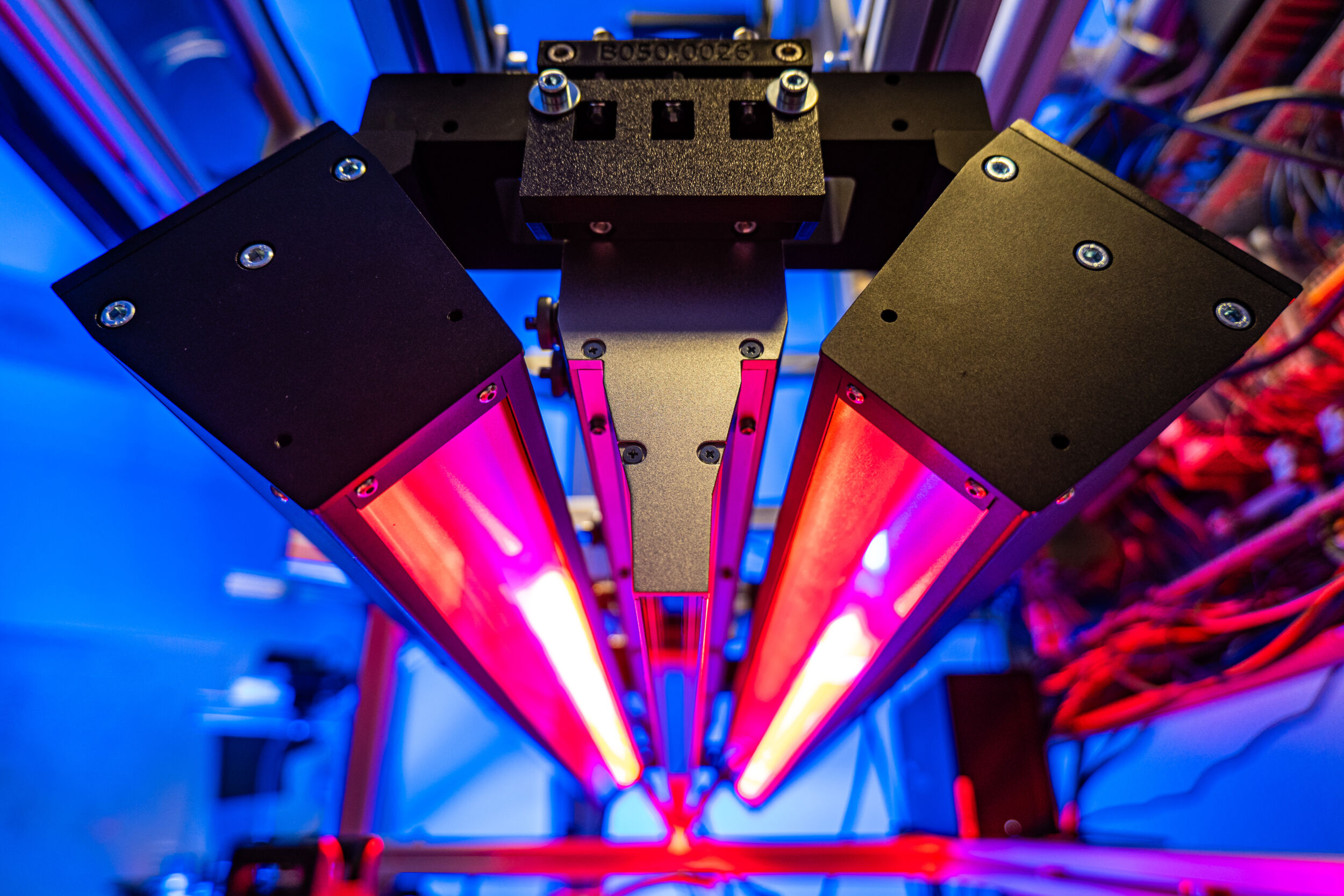
Grundlage des Systems ist der DeepScan 3D Sensor. Dieser Stereosensor ist oberhalb der Depalettierstation installiert und nimmt Bilder der Paletten mit den darauf gestapelten KLT mit Hilfe eines Projektionsverfahrens auf und berechnet daraus eine 3D-Punktewolke. Dabei setzt OSC 6D zur optischen 3D-Lagebestimmung auf ein formbasiertes Antastverfahren. Anstelle von Kanten, Löchern oder anderen prägnanten Objektmerkmalen wird die geometrische Außenkontur eines Bauteils oder Werkstücks ganz oder teilweise verwendet, um dessen Position bzw. Lage und Orientierung zu ermitteln. Durch ein spezielles 3D-Matching mit CAD-Referenzdaten kann das System die tatsächliche Bauteillage zur Führung beliebiger Handhabungseinheiten wie beispielsweise eines 6-Achs-Roboters präzise berechnen.
„Nach einer Höhenauswertung der Punktewolke kann das System eine zuverlässige Aussage darüber treffen, ob sich KLTs auf der Palette befinden“, erläutert VMT-Produktmanager Matthias Fiedler. „Im nächsten Schritt wird dann die oberste Schicht der Punktewolke in ein höhenkodiertes Grauwertbild umgewandelt und die Ecke eines Kleinladungsträgers aus einer definierten Suchrichtung ermittelt. Ist diese gefunden, so sucht das System mit einem Kantenerkennungs-Tool in X- und Y-Richtung nach den KLT-Rändern. Anhand der so gewonnenen Kantenlängeninformation identifiziert das System eindeutig den aktuellen Kistentyp und seine Orientierung und verfügt somit über die Information, ob die Kiste in 0°- oder 90°-Lage auf der Palette steht.“