Traditional bin picking has long faced persistent challenges that limit its effectiveness, especially in demanding industrial environments. One of the most critical limitations is the reliance on a single camera perspective, which often fails to capture the full complexity of the scene. Thin, reflective, metallic, or irregularly shaped objects can evade detection, leading to missed parts and longer cycle times. Accessing hard-to-reach items presents another major obstacle. As bins empty or objects become en-tangled in corners or compartments, traditional systems struggle to localize and pick these components without error. This often results in inefficient picking sequences and potential damage to surrounding items, along with a necessity for manual intervention. Collision avoidance adds yet another layer of complexity. Without precise, real-time data, robots risk colliding with bin walls or other components, jeopardizing operational safety and increasing downtime. Traditional bin picking solutions often rely on fixed, static sensors that cannot adapt dynamically to shifting environments, limiting flexibility and requiring complex software workarounds.

Modernizing Bin Picking
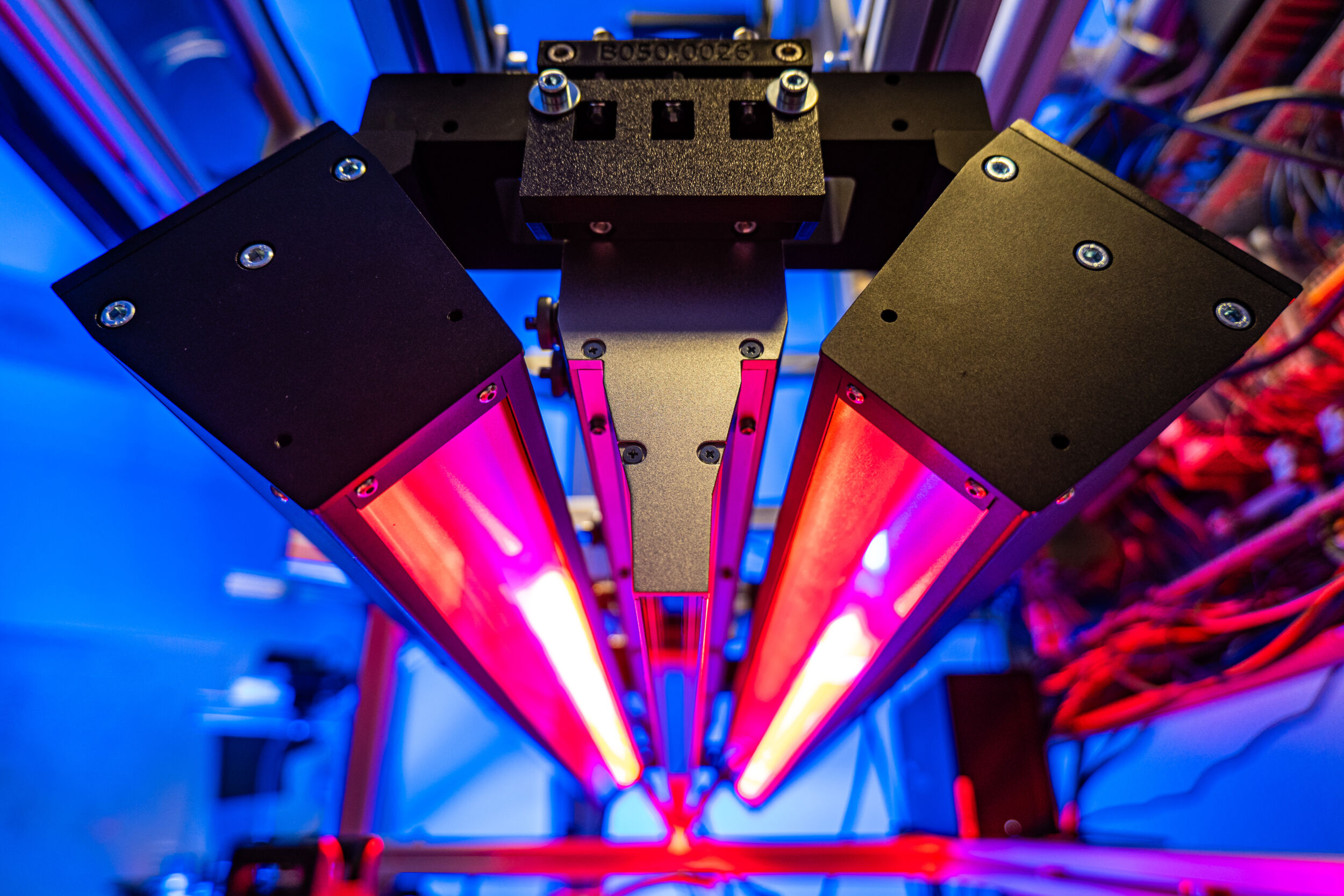
„What if you could slash your bin picking cycle time by 30 percent and finally conquer the most challenging materials? At Photoneo, we are launching new MotionCam-3D Color (Blue) – the next-generation 3D vision sensor with blue laser,“ says Photoneo’s Martin Michalik from the Product Team, „One of the most powerful ways to utilize its power is through advanced bin picking, which thrives on multi-perspective scanning, with no laser interference.“ Modern bin picking solutions are significantly improving performance by incorporating advanced technologies like sophisticated path-planning and real-time obstacle avoidance. These innovations allow for dynamic adjustments to robot picking strategies, minimizing collisions and increasing the success rate of item retrieval. A critical factor behind these improvements is overcoming the long-standing challenge of precise and reliable object localization. Traditional bin picking systems often rely on a single camera. However, this approach frequently struggles with the complex shapes and materials common in industries like automotive – parts that might be thin, metallic, reflective, or irregularly shaped. A single viewpoint simply cannot capture enough detail, leading to problems like missed picks, increased cycle times or reduced efficiency.
Multi-Perspective 3D Scanning
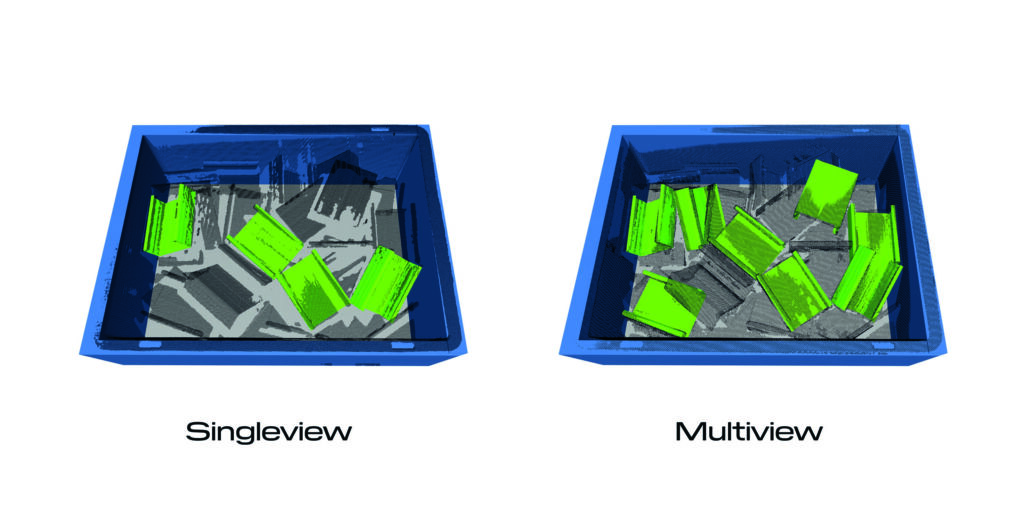
To combat these limitations, next-generation bin picking systems utilize multi-perspective scanning strategies. Two primary approaches enable this multi-perspective capability:
- Multi-Static Sensor Configuration: This configuration employs a primary sensor calibrated to the robot, which is supplemented by secondary sensors calibrated relative to the primary one. Sequential scanning from each sensor generates a detailed scene representation, effectively capturing details that might be obscured from just a single perspective. This method proves particularly effective for static bin setups and environments with predictable object arrangements.
- Dynamic 3D Scanning (Hand-Eye Configuration): This approach involves using a 3D sensor, such as the Mo- tionCam-3D, mounted in a hand-eye configuration directly on the robotic arm. This setup enables dynamic 3D scanning as the robot moves, offering virtually unlimited scanning angles. The continuous stream of captured 3D data is seamlessly integrated to create a unified, real-time model of the scene. This method excels particularly at localizing challenging objects, such as thin metal sheets (including C- or L-shapes), parts with shiny or reflective surfaces, items in bins with compartments, and objects that are partially hidden or self-occluded.
Simultaneous MultiView 3D Scanning
So far, even multi-perspective scanning systems faced limitations due to potential laser interference, which prevented 3D scanners from operating simultaneously and could lead to increased cycle times. Overcoming these challenges, Photoneo has designed a system that allows two 3D cameras with different light wavelengths to be used simultaneously – the distinct wavelengths of blue and red lasers enable interference-free concurrent scanning. This unique capability drastically reduces cycle times by 30 percent while substantially increasing the accuracy, reliability, and completeness of 3D data. Simultaneous dual-laser scanning delivers significant user benefits: