Alternative Greifstrategien
Bin-Picking-Software ermöglicht sechs Sekunden Taktzeit
Bin Picking ist eine Möglichkeit, dreidimensional ungeordnete Werkstücke in die geordneten Strukturen eines Bearbeitungsprozesses zu überführen. Wenn sich Spezialisten wie SSR-Technik als Anlagenbauer, IBW als Bildverarbeiter und Comau als Roboterhersteller zusammen tun, sind praktische Lösungen für den Griff in die Kiste ´vorprogrammiert´. Eine Demozelle liefert hierfür ein überzeugendes Beispiel.
")
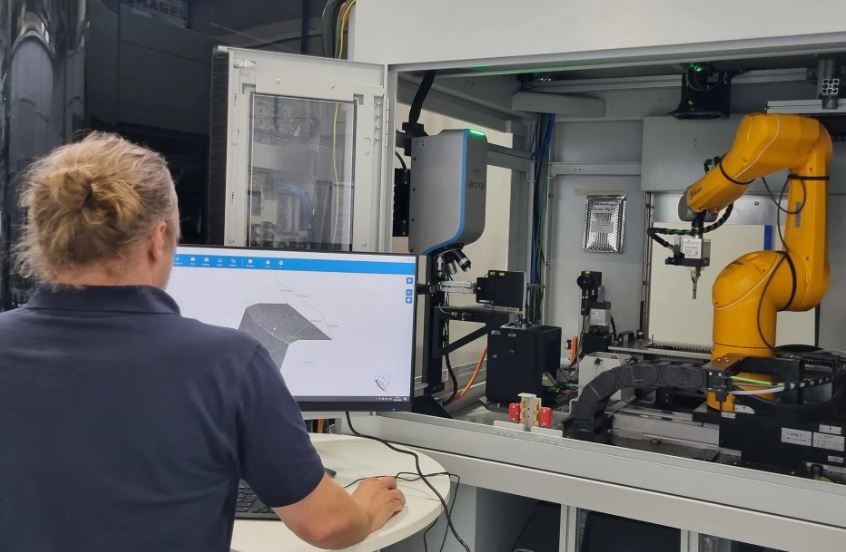
Keimzelle der Anlage ist die Bin-Picking-Software BP3TM, die IBW einsetzt und vom Fraunhofer IPA stammt. Gebaut wurde die Demozelle von SSR-Technik. Das Unternehmen ist im Schaltanlagenbau ebenso aktiv wie in der roboterbasierten Prozessautomation. Auswahlmerkmale für den Roboter sind in erster Linie die Reichweite und die Beweglichkeit des Handgelenkes. Bei der SSR-Zelle steht der Roboter, ein SIX 6-1.4 auf einem Podest. Der Roboter hat eine Traglast von 6kg und die Namenserweiterung 1.4 weist auf die Reichweite hin, die horizontal bei 1.436mm liegt. Zudem kann der Roboter nahezu senkrecht nach unten in die Kiste greifen. Christoph Anding, Account Manager bei Comau Robotics, hat das Projekt mit IBW begleitet und lobt die Arbeit des Systemintegrators: „Eine Bin-Picking-Lösung kann eigentlich jeder realisieren. Interessant wird es bei der Kollisionserkennung und den alternativen Greifstrategien. Das sind die harten Selektionskriterien.“ Denn damit ein Roboter tatsächlich autonom durcharbeiten kann, ist auch ein Plan B, sprich eine alternative Greifstrategie, erforderlich. Für einen Werker ist es überhaupt kein Problem, ein Werkstück aus einer Kiste zu entnehmen, auch wenn andere Werkstücke teilweise darüber liegen oder er nachfassen muss, um das Teil tatsächlich sicher mit der Hand zu greifen. Solche Greifstrategien macht die Bin-Picking-Software BP3TM möglich. Zum Standard gehören Anlagen, in denen Rüttelplatten die mit Teilen gefüllten Kisten oder Behälter so lange rütteln, bis die Bildverarbeitung wieder eindeutige Werkstücklagen identifizieren und in Greifpositionen für den Roboter umrechnen kann. Nicht so bei IBW, wie Anding beschreibt: „Zu den Feinheiten, die das Know-how ausmachen, gehört es, dass der Roboter ein Teil auch einmal aus einer vertrackten Position herauszieht und dann sicher nachgreift. Ganz so, wie es ein Werker eben auch tun würde.“ Ullrich Göllner, Applikationsingenieur bei IBW, hebt das Besondere an der erarbeiteten Lösung hervor: „Mit unserem System können wir Behälter komplett und kollisionsfrei nach einer vorgegebenen Entnahmestrategie entleeren.“ Schon eine Übereinstimmung von 60 bis 70 Prozent des gescannten Bildes mit einem hinterlegten CAD-Modell führe zu einer greiffähigen Positionsgabe für den Roboter und das innerhalb einer definierten Taktzeit. In der Testzelle wird das zu greifende Werkstück zunächst von einer Stereo-Bildaufnahmeeinheit in 3D erfasst. Dazu wird ein Lichtmuster auf den Kisteninhalt projiziert, die dabei entstehende Struktur von zwei Kameras erfasst und eine 3D-Punktewolke erzeugt. Anschließend wird auf Grundlage eines hinterlegten CAD-Modells ein Bauteilmodell in die Punktewolke gefittet. Mit diesem Vorgang werden die Lagekoordinaten der Bauteile ermittelt und dienen als Grundlage der Verfahrprozedur des Roboters. Die Entnahmeplanung berücksichtigt neben den Greifkoordinaten auch mögliche Hindernisse im Behälter und im Arbeitsraum des Roboters. Großen Einfluss auf die Objekterkennung hat Licht aus der Umgebung, wie Göllner ausführt: „Mit zunehmendem Fremdlichteinfall muss die Leistungsfähigkeit der 3D-Scaneinheit erweitert werden, als Grundlage einer störfreien 3D-Punktewolke.“ Die ermittelten Lagekoordinaten dienen als Grundlage eines sicheren Greifens und für mögliche Bauteile-Taktzeiten. Göllner: „Taktzeiten ab sechs Sekunden sind mit vertretbarem Kostenaufwand zu realisieren.“
Machbarkeitsstudien
")
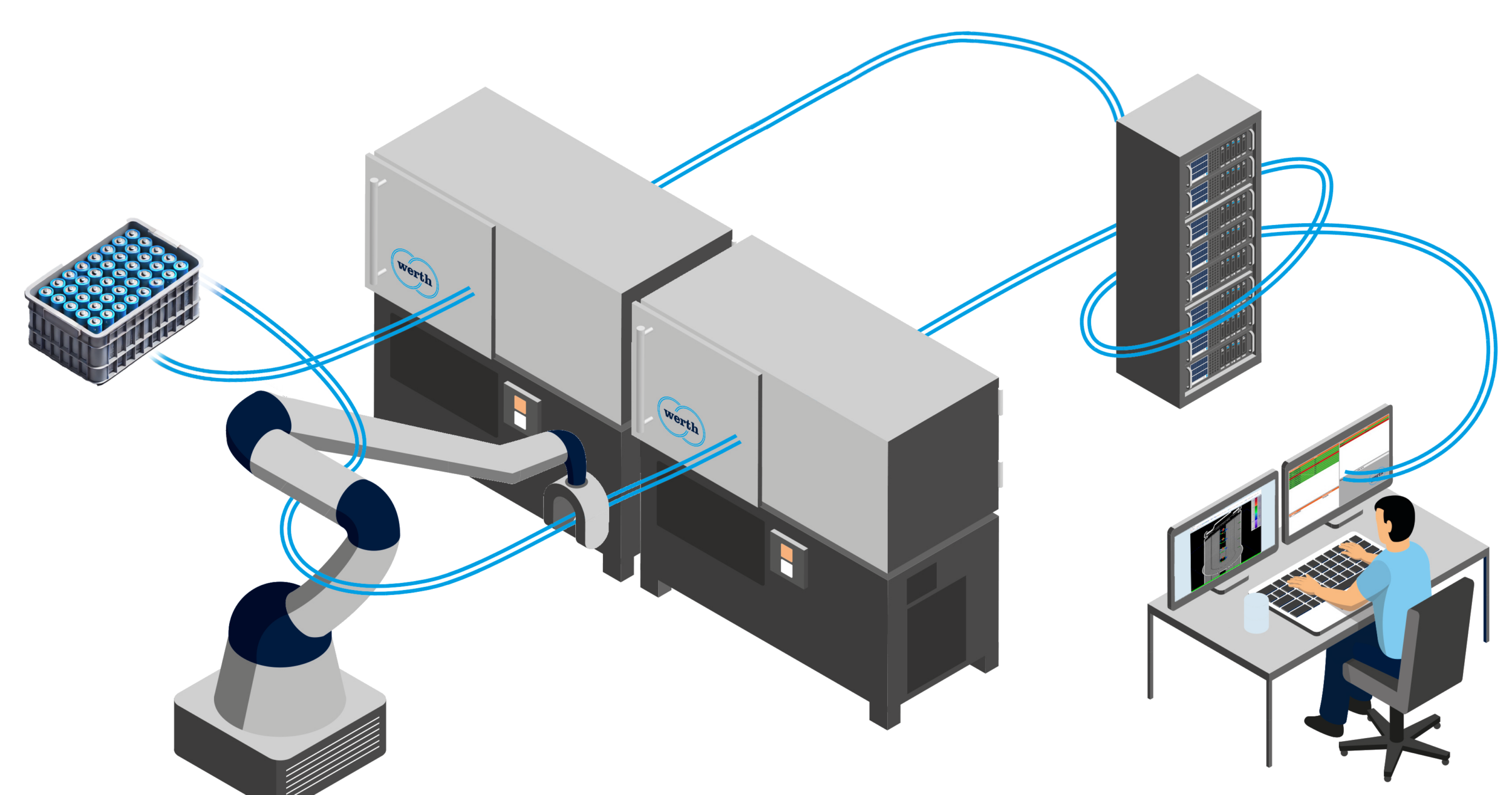
Die Bin-Picking-Zelle ist modular ausgelegt. Zu den Basiseinheiten zählt die 3D-Scaneinheit und die PC-Plattform für die BP3TM-Software. So wie SSR die Zelle konzipiert hat, können je nach erforderlicher Reichweite und Traglast unterschiedliche Roboter eingesetzt werden. Zum Scanning stehen marktübliche Einheiten der Stereo-Bildaufnahmetechnik und der Laser-Triangulation zur Verfügung. Göllner: „Nach den Vorgaben und Wünschen des Kunden ergeben sich Eckwerte der jeweiligen Aufgabenstellung und danach legen wir die Bildverarbeitung aus.“ Für die Datenaufnahme setzt IBW unterschiedliche 3D-Scanner ein: „Wir sind in der Bildverarbeitung nicht an einen bestimmten Hersteller gebunden, sondern setzen die jeweils optimal passende Technik ein.“ Dabei wird zwischen den technischen Anforderungen und den Kosten abgewogen, denn kurze Taktzeiten und ein sicherer Greifprozess sind für den Betreiber einer solchen Zelle ebenso wichtig wie die Investitionskosten und ein schneller ROI. In der Testumgebung bei IBW in Weimar stehen für Machbarkeitsstudien entsprechend ausgestattete Roboterzellen bereit. Göllner: „Damit können wir in einer frühen Projektphase den gesamten Bin-Picking-Prozess abbilden.“ Mit konkreten CAD-Daten eines Werkstückes lassen sich Aussagen treffen, ob eine Bin-Picking-Lösung die Aufgabe ideal löst. Sowohl SSR als auch IBW bieten hierzu entsprechende Simulationen in einer frühen Projekt-Gestaltungsphase an. Die Resultate sollten eine Einschätzung über die Rentabilität und die zu erwartenden Taktzeiten geben. Die Zellen erledigen den Griff in die Kiste inzwischen schon länger als ein Jahr störungs- und nahezu wartungsfrei.