Adaptive Robotersteuerung
Realitätsnahe Simulation von Greifprozessen
Durch Robot Vision können heute viele Industrieprozesse wirtschaftlich automatisiert werden. Doch bereits die Projektierung einer Robotikanwendung ist komplex und zeitintensiv. Frühzeitige Tests der Hard- und Software sollen Störungen bei der Inbetriebnahme vermeiden. Die Entwicklung und Verbesserung von Greifprozessen erfolgt mit dem Mikado ARC Simulator vollständig virtuell und soll damit die Inbetriebnahmezeit am Roboter und die Entwicklungskosten für neue Hardwarekomponenten reduzieren.
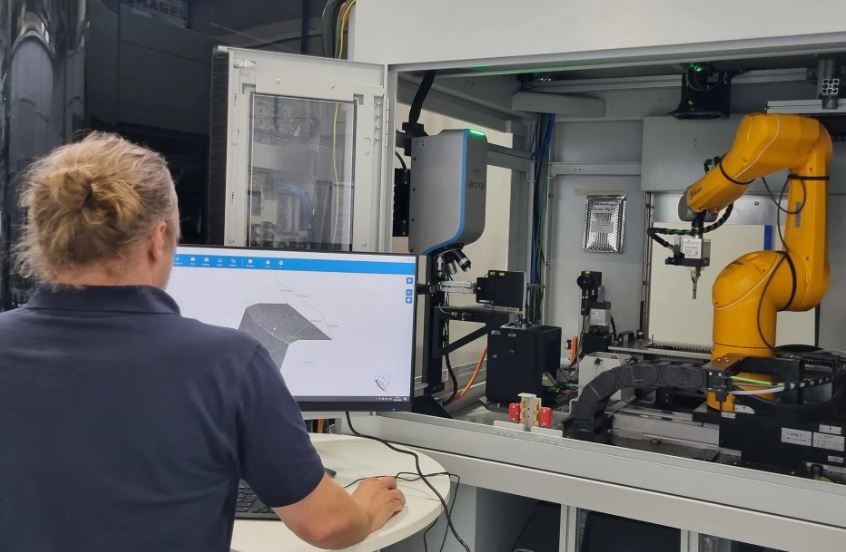
In der industriellen Produktion ist die Robotik eine der am schnellsten wachsenden Technologien. Sie ermöglicht Automatisierern eine hohe Fertigungsflexibilität bei gleichzeitig hoher Prozesssicherheit und Produktivität. Sensoren und moderne Kameratechnik schaffen eine virtuelle Abbildung der Realität, die Roboter befähigt, ihre Umgebung adaptiv zu erfassen und auf Situationen zu reagieren. Beim Griff in die Kiste mit chaotisch liegenden Teilen ermittelt die Robotersteuerung mithilfe einer dreidimensionalen Abbildung in Form einer 3D-Punktewolke, wie Teile sicher gegriffen und lagerichtig weitergereicht werden können. Was für den Betrachter so einfach und selbstverständlich aussieht, sind komplexe Prozesse mit viel Fehlerpotenzial. Ein Roboter führt seine Griffe nur sicher und reproduzierbar aus, wenn viele Faktoren vor Realisierung der Greifsituation bekannt sind und in die Entwicklung einfließen können.
Mögliche Fehlerquellen
Mögliche Fehlerquellen und Störungen möchten Systemintegratoren schon während der Planungs- und Konzeptionsphase weitestgehend ausräumen, um Stillstandzeiten während des produktiven Betriebs und zeitintensive Nacharbeiten zu vermeiden. Doch lange Testphasen mit aufwendig gefertigten Prototypen können die Entwicklung eines Projekts schon im Vorfeld unrentabel machen. Auch die Verbesserung von Taktzeiten oder des Entleerungsgrads kann eine laufende Bin-Picking-Anwendung längere Zeit still legen. Wie können Systemintegratoren die Planung, Inbetriebnahme und Wartung einer Robotikanlage dennoch wirtschaftlich durchführen?
Simulierte Inbetriebnahme
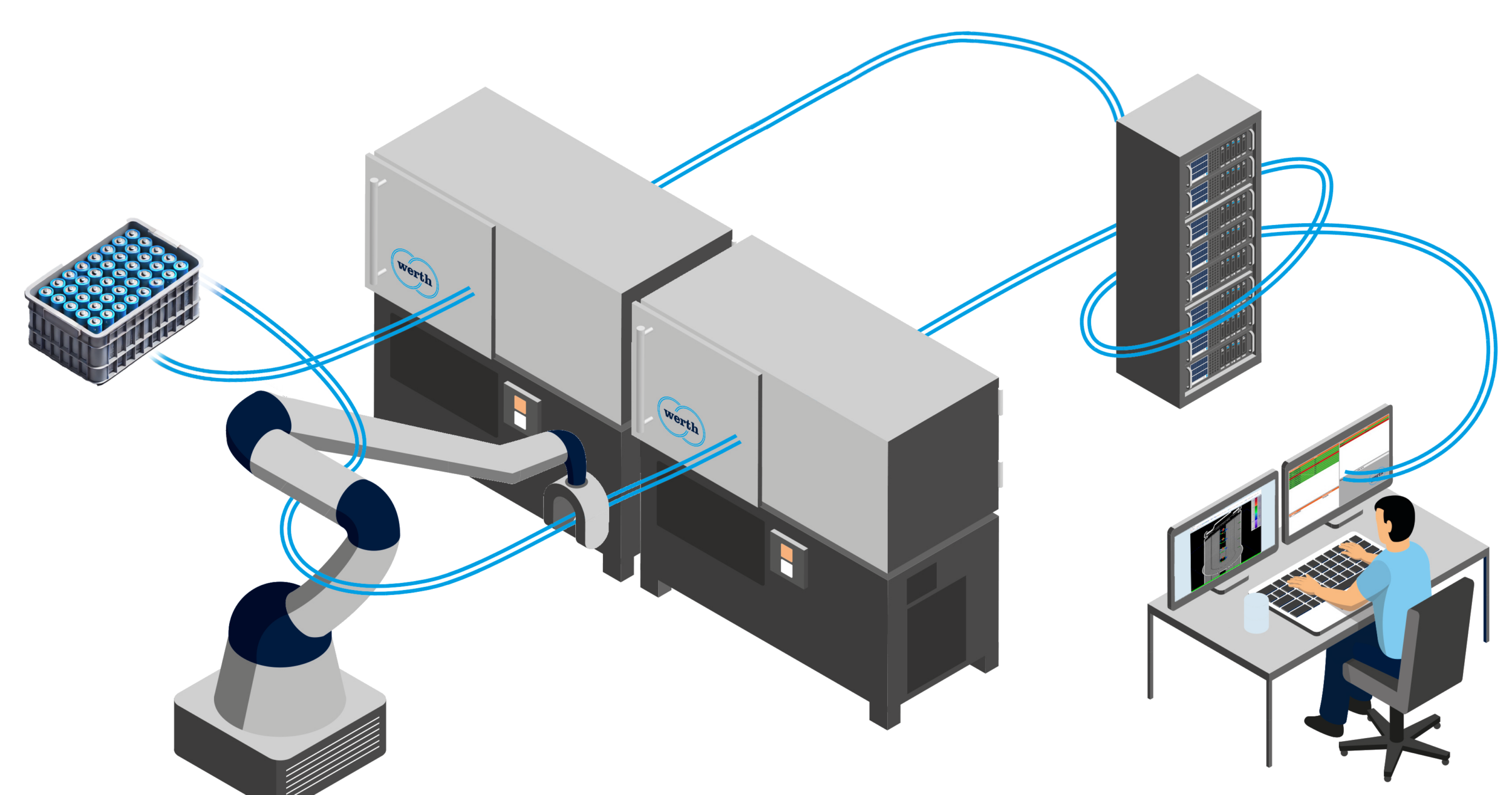
Robotersteuerungslösungen wie Mikado ARC ermöglichen Systemintegratoren die Modellierung der Roboterzelle, der Greiferausführung und vieler weiterer Basisparameter als digitales Abbild einer realen Szene. Mit diesem digitalen Zwilling kann das Anlagenkonzept bereits in automatisch laufenden Simulationsläufen verifiziert und verbessert werden, obwohl zu diesem Zeitpunkt noch kein einziger Prototyp in Realität gefertigt wurde. Die Simulation der Hardwarekomponenten wird mit Hilfe der Planungsdaten und der realen Steuertechnik durchgeführt. Dadurch zeigt die virtuelle Inbetriebnahme Ergebnisse und potenzielle Probleme des geplanten Anlagenkonzepts auf, und zwar schneller, kostengünstiger und mit viel größeren Variationsmöglichkeiten, als es mit einer realen Testanlage möglich wäre. Und alle dabei ermittelten Erkenntnisse und Parameter können bei der folgenden realen Inbetriebnahme 1:1 weiter verwendet werden.