Simulation der Deformation
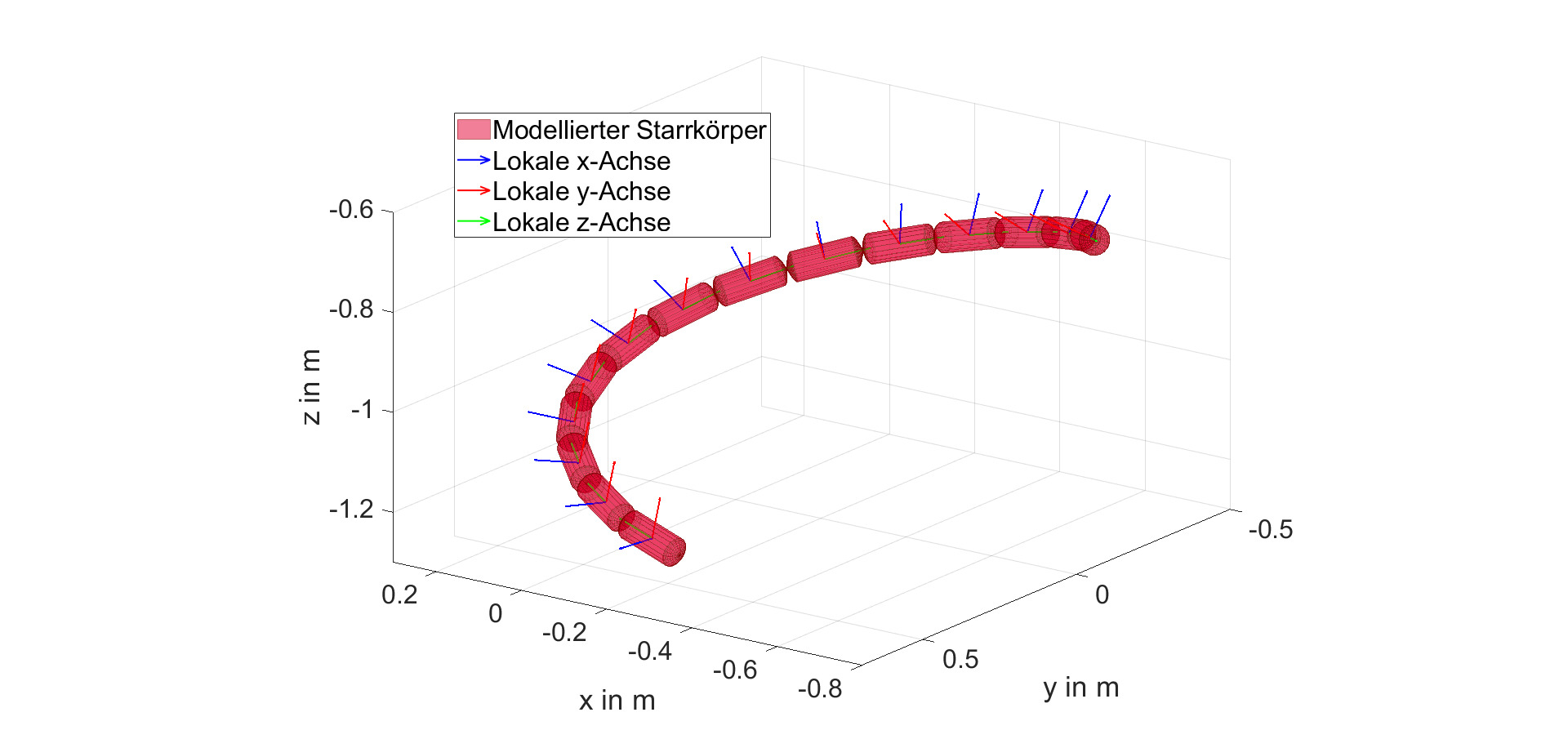
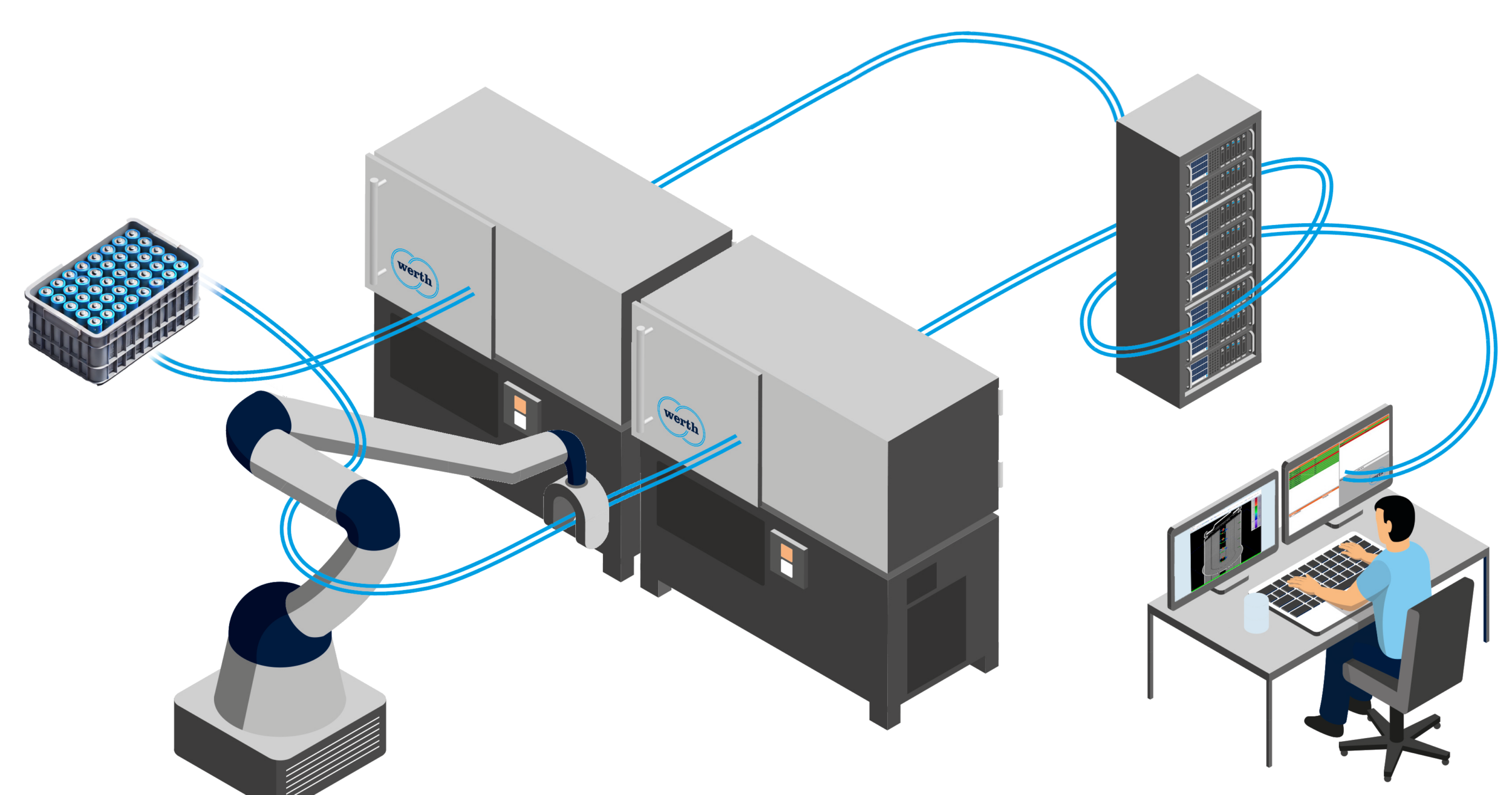
Das Konzept fokussiert sich auf Linear-Deformierbare Objekte (LDO), also biegeschlaffe Objekte mit länglicher 1D-Geometrie, z.B. Kabel, Leitungen und Schläuchen. Die Idee ist, das Deformationsverhalten in einer numerischen Simulation abzubilden und das Simulationsmodell mit verfügbaren Sensordaten einer Stereokamera zu synchronisieren, sodass die Robotersteuerung während des Handhabungsprozesses auf die, durch die Simulation angenäherten, Positionsdaten des LDO zurückgreifen kann. Die Simulation dient dazu die jeweils zuletzt mit den Sensordaten abgeglichene Konfiguration zu speichern und die Verformung, für den Zeitraum in der die Verarbeitung der Sensordaten erfolgt, vorherzusagen. Zu Beginn der Anwendung wird das biegeschlaffe Objekt als finite Segmente Objekt in einer Mehrkörpersimulation initialisiert. Dabei wird das Objekt zuerst durch zwei Graustufen Kameras erfasst, welche in einem FPGA rektifiziert und mithilfe eines Stereomatching-Algorithmus in eine Punktwolke überführt werden. Anschließend wird die Punktwolke mithilfe der entwickelten Methodik verarbeitet und in eine Liste von Gelenkwinkeln überführt. Das Modell der Mehrkörpersimulation wird dann mit den ermittelten Gelenkwinkeln, die zwischen den Segmenten des Modells auftreten, aktualisiert. Die Simulation bildet somit den Zustand des Objekts zum Aufnahmezeitpunkt als eine diskrete Menge von Positionswerten der einzelnen Segmente ab, die von der Robotersteuerung zur Laufzeit eines Roboterprogramms abgefragt werden können. Die am ISW verwendete Stereokamera ist eine SceneScan Pro von Nerian, die bei einer maximalen Auflösung von 1.856×1.856 Pixel und 256 Tiefenstufen bis zu 100fps erreicht.