

In einem neuen Release der Software erfolgt nun eine entscheidende Verbesserung: KI und maschinelles Lernen ermöglichen das automatische Einrüsten neuer Bauteile in den Bin Picking-Prozess. Dabei berechnet das System auf Basis realer Scan-Daten die geometrischen Parameter der Bauteile und analysiert die Auflösung und das Rauschverhalten des Sensors. Anschließend werden aus diesen Scan-Daten Testmessungen generiert, mit deren Hilfe dann die optimalen Einstellparameter ermittelt werden. Indem das System sich beim Einrüsten mit jedem Scan selbst trainiert, schafft es die Grundlage für den nächsten Schritt: das maschinelle Lernen im laufenden Betrieb.
Offenes All-in-one Paket
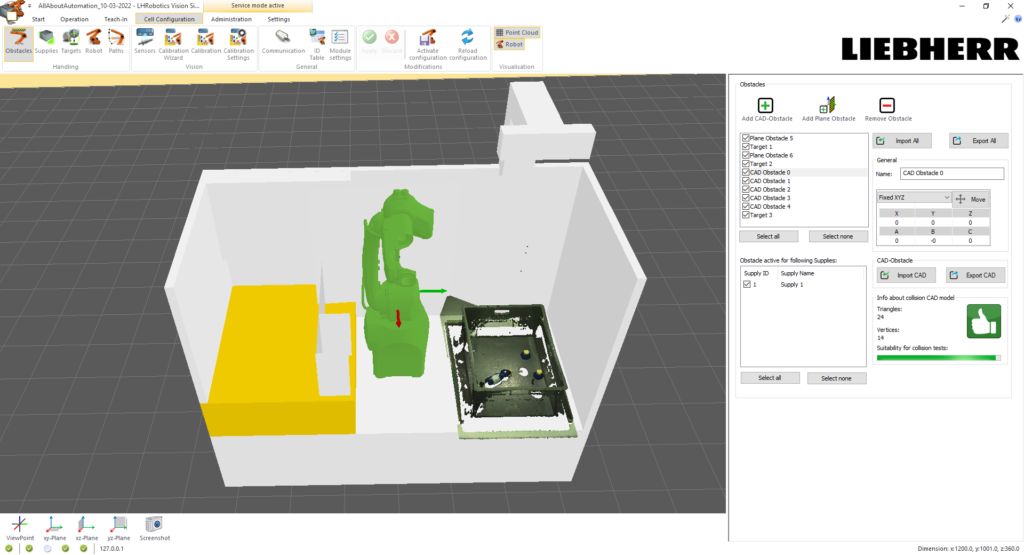
Vom Algorithmus bis zur Kamera steht mit LHRobotics.Vision ein umfangreiches Gesamtpaket zur Verfügung. Der dreistufige Algorithmus wurde von einem führenden Forschungsinstitut entwickelt. Liebherr industrialisierte die Software wobei eine intuitive Benutzeroberfläche entstanden ist, mit der sich neue Werkstücke innerhalb von Minuten einrichten lassen und der gesamte Prozess in wenigen Stunden sicher läuft. Bei den Sensoren setzt Liebherr vorwiegend auf die 3D-Farbkameras von Zivid, die auch bei schwierigen Teilen vollständige Punktewolken liefern, z.B. bei Spiegelungen oder geringem Kontrast zur Unterlage. Durch die offene Sensorschnittstelle kann aber für besondere Anwendungen eine andere Kamera verwendet werden. Durch die Möglichkeit, Werkstück, Greifer sowie Roboter mit der gesamten Umgebung abzubilden, ist die Bahnplanung von der Entnahme bis zur Ablage des Bauteils inklusive Kollisionsüberwachung in einer Software gebündelt. Greifer können mit allen Achsen und Freiheitsgraden angelegt werden, sodass auch mechanische Greifer realitätsgetreu abgebildet werden. Komplettiert wird das Paket durch ein umfangreiches Angebot für Schulungen und Machbarkeitsanalysen im eigenen Kundenzentrum in Kempten.
LHRobotics.Vision ermöglicht eine kollisionsfreie Teileentnahme chaotisch orientierter Teile mit (Pro) bzw. ohne (Basic) Bahnplanung zur Ablagepositionierung.
LHRobotics.Vision Basic
– Anlegen von Werkstücken und Greifpunkten
– Bilderfassung und Objekterkennung
– Berechnung eines kollisionsfreien Entnahmepfads für Bauteil und Greifer
LHRobotics.Vision Pro
– Anlegen von Ablagepunkten (inkl. Bahnplanung zur Ablage)
– Einfügen von Hindernissen
– Einfügen eines Robotermodells (inkl. Kinematikberechnung )
– Kollisionsfreie Pfadberechnung für Bauteil, Greifer und Roboter (inkl. Berücksichtigung von Hindernissen )











![Die [me] – mechatronik & engineering wird digital](https://cdn.tedo.be/tedo-mu/wp_uploads/sites/10/2026/03/Unbenannt.jpeg)



