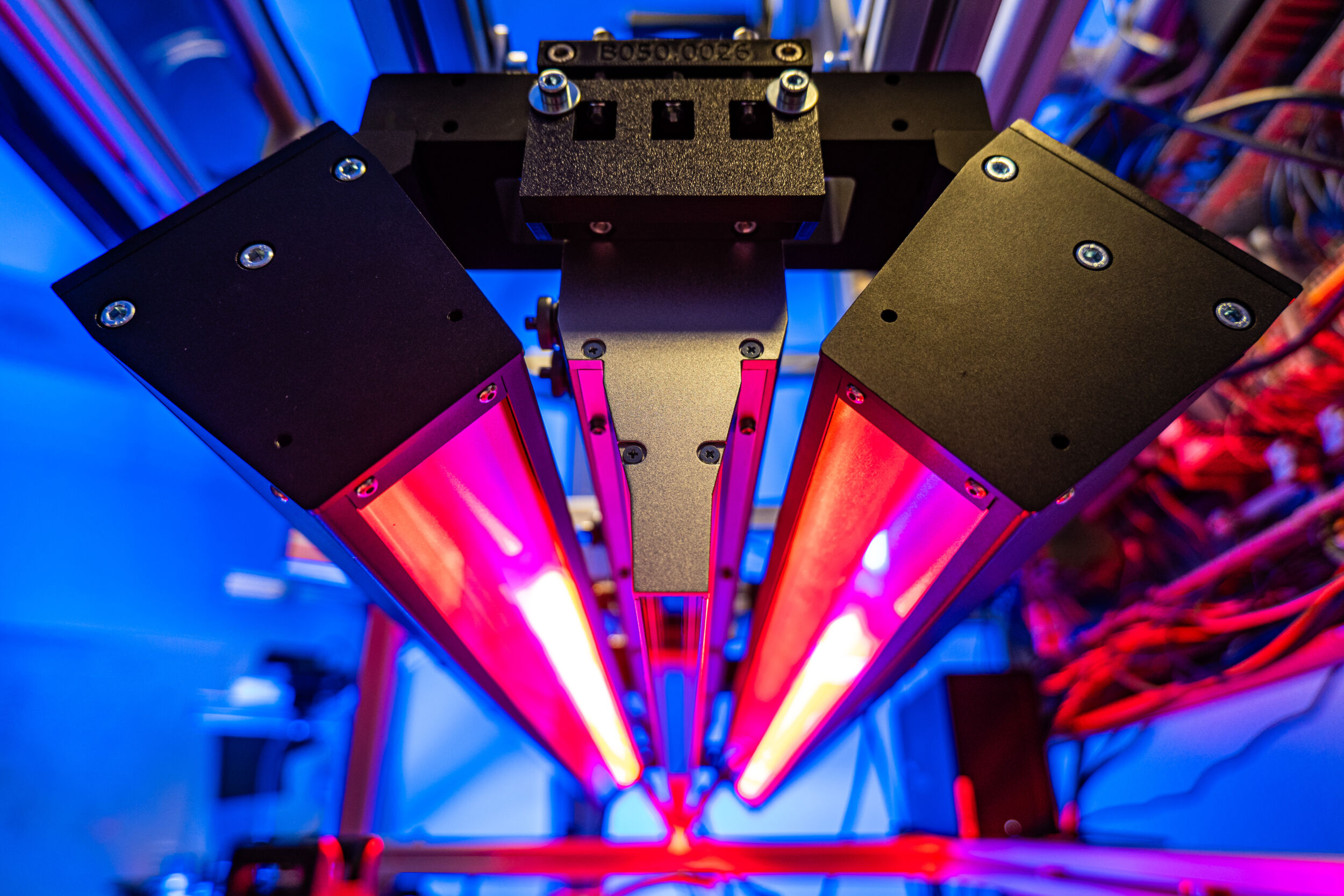
Im Rahmen eines Wettbewerbs der ESA treten Roboterprototypen von Industrieunternehmen sowie Forschungseinrichtungen gegeneinander an. Die Challenge: In einem mondähnlichen Terrain Ressourcen sammeln und auswerten, Messungen durchführen und Karten erstellen. Das Sieger-Team vom FZI Forschungszentrum Informatik setzt in seinen drei Robotern auf die O3R-Plattform von IFM.