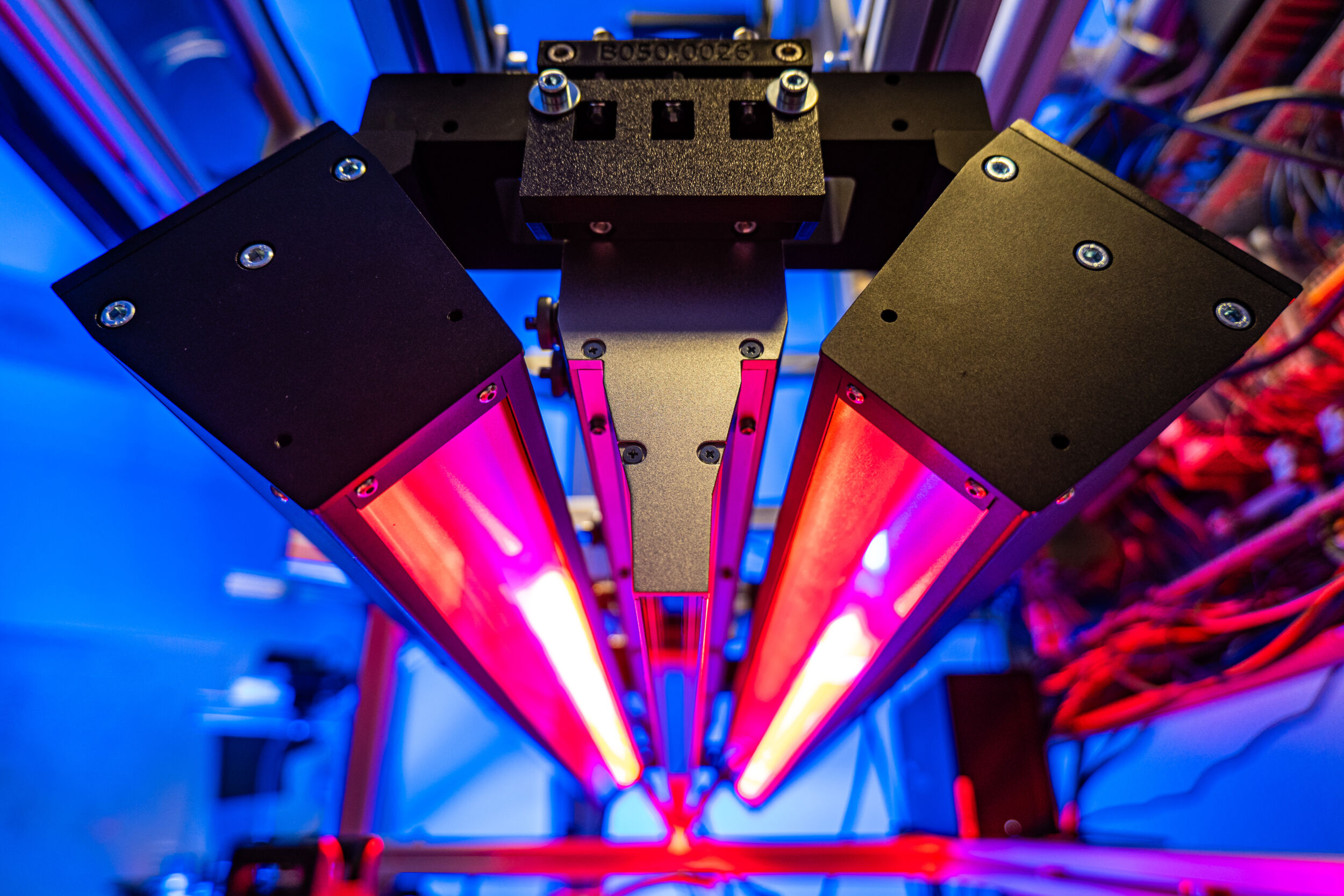
Optimaler Greifpunkt in 0,5s
Das 3D-Robot-Vision-System CV-X480D vereint einen Projektor mit vier Kameras, die das Streifenmuster des Projektors aus verschiedenen Richtungen und ohne Totzonen erfassen.
")
Der optimale Greifpunkt wird aus 136 Einzelbildern in 0,5s errechnet. Der Suchbereich für Werkstücke wird abhängig von der Behälterposition nachgeführt, um Bauteile auch im Randbereich sicher greifen zu können. Das gesamte System ist in 15min betriebsbereit. Es stehen verschiedene Messbereiche von 520x390x200mm bis 1.260×1.260×1.000mm mit einer Wiederholgenauigkeit bis +-0,1mm zur Verfügung.