Traditional RGB-D systems often require system integrators to assemble a 3D depth camera with a separate 2D RGB camera. Mechanical mounting, spatial calibration, and precise mapping of 3D data to 2D pixel data must typically be performed during system installation, adding time and complexity to the integration process. The Helios2 Chroma cameras address this challenge through factory assembly and calibration, delivering RGB and depth data directly from the device. Each camera is precisely aligned and calibrated during manufacturing, enabling engineers to immediately access overlaid RGB and depth information without additional field calibration. By eliminating these integration steps, system developers can focus on application development rather than mechanical alignment and calibration workflows.
Aligned RGB-D Data
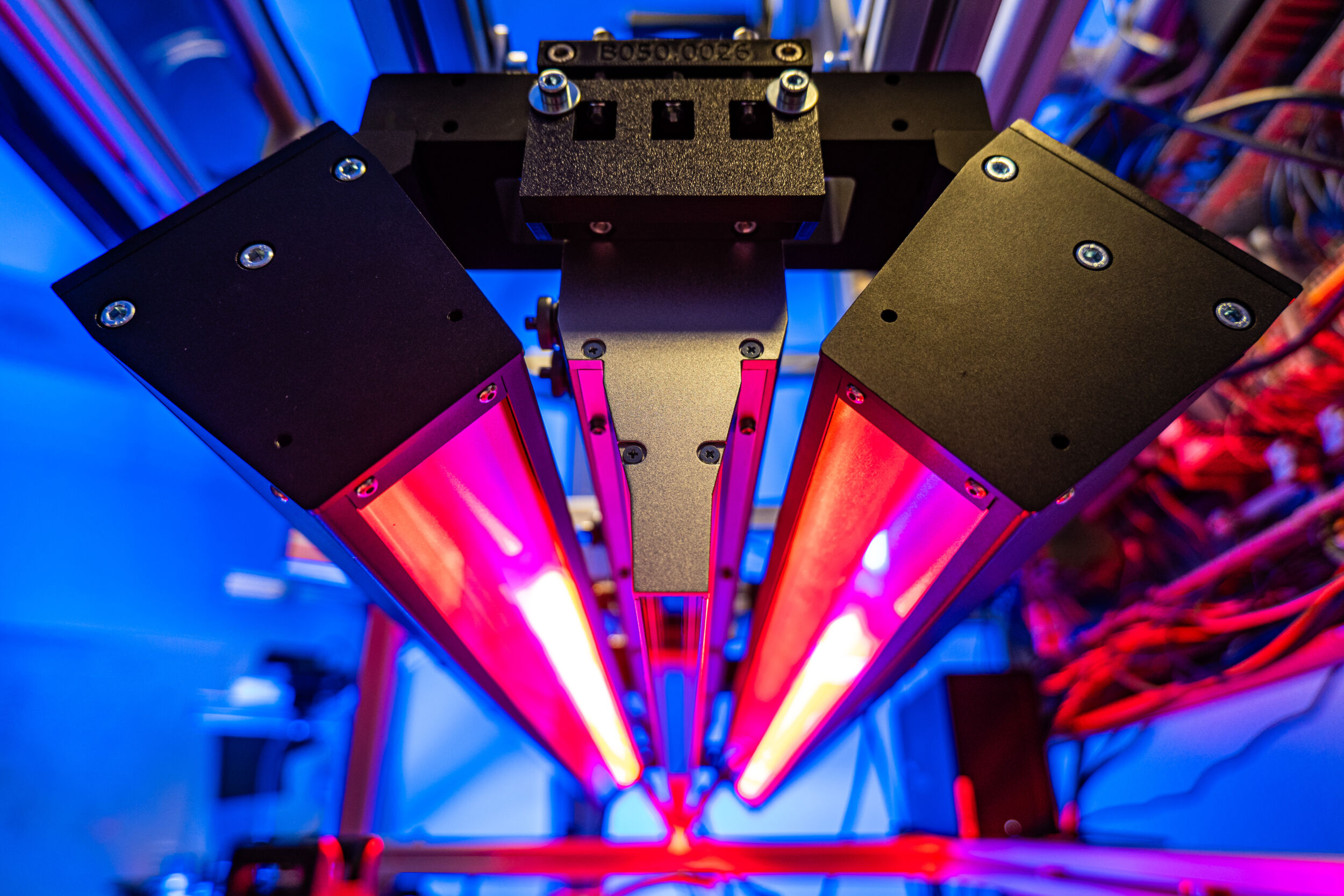
At the core of the Helios2 Chroma cameras is a ToF depth sensor paired with a high-resolution RGB camera. The Helios2 Chroma integrates the Sony IMX556 DepthSense ToF sensor with a Sony RGB sensor, delivering precisely aligned colour and depth data. While the depth data is output at 640×480 resolution, the RGB sensor operates at a higher resolution to ensure complete and accurate colour mapping. During calibration and alignment, RGB data must be projected into the depth coordinate space, which involves resampling and interpolation. Using a higher-resolution RGB sensor provides additional pixel density, preventing gaps, reducing artifacts, and ensuring consistent colour coverage across the full field of view (FoV). This provides developers access to geometric depth information with visual texture and accurate colour data and is particularly useful in applications where depth data alone may not provide sufficient information for reliable object recognition or classification.
The Helios2 Chroma family is built on Lucid’s Factory Tough platform, designed specifically for industrial machine vision environments. The cameras feature an IP67-rated enclosure. Industrial connectivity is provided through locking M12 and M8 connectors for Ethernet, power, and I/O. The cameras are also validated for shock, vibration, and electromagnetic compatibility requirements.

Multi-Camera System for Larger Scenes
In many 3D vision applications, a single camera cannot capture the entire scene due to occlusions or limited FoV. The Helios2 Chroma cameras support multi-camera use, enabling up to five units to operate together as a coordinated imaging system. This capability allows engineers to expand the observable workspace, improve coverage, and minimise occlusion effects while maintaining consistent alignment between depth and colour data across all cameras. Because each camera is factory-calibrated, multi-camera deployments can be configured with predictable and repeatable results.
All cameras are supported by Lucid’s Arena SDK, which provides tools for visualisation, development, and system integration. Developers can access raw depth data, RGB images, and generate point clouds in real time, enabling rapid development of advanced perception algorithms. The SDK supports common programming language and allows engineers to implement custom post-processing pipelines, integrate AI-based object recognition, or build application-specific analysis tools. This flexibility is particularly valuable for robotics and machine learning applications that require access to both geometric and visual data streams.
Applications Across Automation
The combination of aligned colour and depth data expands the range of applications for industrial 3D vision systems. One common use case is robotic palletising, where the depth sensor provides accurate position and volume information while the RGB camera enables tasks such as barcode reading, OCR, or visual identification of packages. This combination allows robots to perform more intelligent picking and sorting operations. Additional applications include robotic bin picking, material handling and logistics automation, factory automation and inspection, object recognition and classification or quality verification prior to robotic grasping. In these scenarios, RGB data enhances scene understanding where depth information alone may be insufficient, enabling more accurate automation decisions.
Broad Portfolio of Industrial ToF Cameras
While the Helios2 Chroma models introduce integrated RGB-D capability, they are part of a broader 3D vision portfolio from Lucid. The Helios2 camera lineup includes the Helios2 Wide with a broad 108°x78° FoV, the Helios2 Narrow with a focused 31°x24° FoV, and the Helios2+, which adds high dynamic range and high-speed operating modes. For outdoor applications, the Helios2 Ray is optimised for full-sunlight operation using 940nm VCSEL laser diodes to generate reliable real-time 3D point clouds.