Fallstrick 1: Kalibrierung des Robotersystems
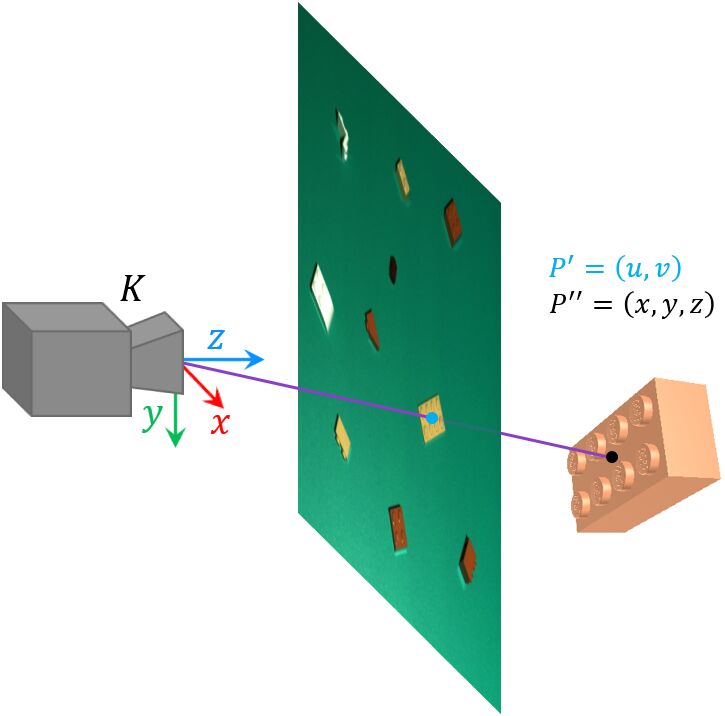
Vor der Bahnplanung müssen zwei Kalibrierschritte durchgeführt werden, die intrinsische sowie die extrinsische Kalibrierung. Hierfür stehen Open-Source-Lösungen, wie z.B. die Bildverarbeitungsbibliothek OpenCV, zur Verfügung. Mithilfe der intrinsischen Kalibrierung werden kamerabezogene Parameter ermittelt, die für die inverse perspektivische Projektion von 2D-Pixelkoordinaten in 3D-Kamerakoordinaten notwendig sind. Bild 2 veranschaulicht das Problem der inversen perspektivischen Projektion. Gegeben ist eine Pixelkoordinate P‘ im Kamerabild P‘ kann z.B. durch einen Bildverarbeitungsalgorithmus ermittelt werden, der in diesem Fall auf das Erkennen von Klemmbausteinen spezialisiert ist. Damit der erkannte Stein vom Roboter gegriffen werden kann, muss die Pixelkoordinate P‘ zunächst in eine kartesische, also räumliche, Koordinate bezüglich des Kamerakoordinatensystems K projiziert werden. Das Problem der inversen perspektivischen Projektion ist, dass sie unterbestimmt ist. Für die Berechnung von P‘ wird seine z-Komponente benötigt. Mit einer einzelnen RGB-Kamera ist es also nicht ohne weiteres möglich, diese Projektion durchzuführen. Abhilfe kann z.B. eine Tiefenkamera schaffen, die die z-Werte liefert.
Als nächstes muss die extrinsische Kalibrierung durchgeführt werden. In Bild 3 ist schematisch ein System bestehend aus Roboter und Kamera dargestellt. Durch die Kalibrierung wird die Pose (grüner Pfeil), also die Position und Orientierung, der Kamera K relativ zum Roboter R bestimmt. Mithilfe dieser Information kann eine Kamerakoordinate von z.B. einem Klemmbaustein (violetter Pfeil) in Roboterkoordinaten (hellblauer Pfeil) umgerechnet werden. Erst dann ist es möglich, dass der Roboter diese Koordinate anfahren kann. Hierbei ist zu beachten, dass die Kalibrierung sorgfältig durchzuführen ist, da sonst ein Offset zwischen Soll- und Ist-Pose des Roboters entsteht.
Fallstrick 2: Inverse Kinematik
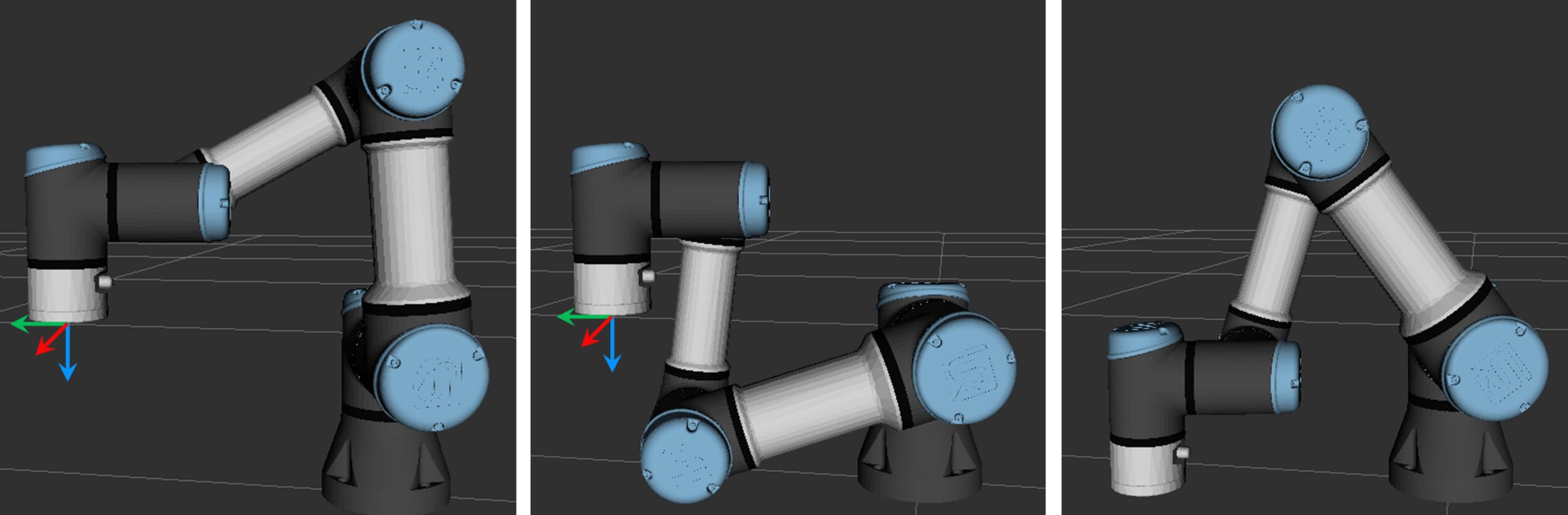
Für die Bahnplanung ist auch die Kinematik des Roboters wichtig. Ein Knickarmroboter besteht aus einzelnen hintereinandergeschalteten Gelenkmotoren. Jedoch besteht eine kartesische Zielpose, die z.B. der Greifer einnehmen soll, aus Zielpunkt und Zielorientierung. Die kartesische Pose muss also in einen Satz an Gelenkwinkeln (Konfiguration) umgerechnet werden. Diese Umrechnung wird inverse Kinematik genannt und ist nicht in jedem Fall eindeutig. Zudem besitzt nicht jede der möglichen Lösungen dieselbe Güte, denn es gibt günstigere und ungünstigere Konfigurationen. In Bild 1 sind links und mittig zwei Startkonfigurationen abgebildet, die beide die identische Pose am letzten Glied des Roboters einnehmen, sich aber in der Stellung ihres Ellenbogengelenks unterscheiden. Um die Zielpose rechts anzufahren, ist die mittige Startkonfiguration ungünstig, da der Roboter während der Fahrt seinen Ellenbogen nach oben bringen muss, um nicht mit dem Boden zu kollidieren. Er kann nicht, wie bei der linken Konfiguration, in einer geraden Linie nach unten fahren Das Problem lässt sich oft mit einer günstigen Initialisierung der inversen Kinematik beheben. In diesem Fall kann der Ellenbogen aber auch durch Achsspiegelung nach oben gebracht werden.
Ein weiteres Phänomen der inversen Kinematik tritt auf, wenn sich Gelenkwinkel 360° und mehr drehen lassen. Um die in Bild 4 heller dargestellte Zielpose zu erreichen, können die Gelenkwinkel auf verschiedene Weise rotiert werden. In Grün ist der jeweils optimale Fall dargestellt, der zu einer minimalen Drehbewegung führt. Alle anderen Drehungen führen zu zusätzlichen Beanspruchungen der betroffenen Gelenke und zu unnötig erhöhten Taktzeiten. Mittels einer Normierung der von der inversen Kinematik berechneten Gelenkwinkel lässt sich das Problem beheben.