Genauer messen
Messgenauigkeit und -unsicherheit von Infrarotkameras
Der Nutzen von Messergebnissen ist stark eingeschränkt, wenn es an Wissen fehlt, wovon Empfindlichkeit und Genauigkeit der verwendeten Messgeräte abhängen. Dies gilt auch für IR-Kameras. Bei Diskussionen zur Messgenauigkeit der Kameras wird häufig mit komplexen Modellen und Fachausdrücken operiert, die Missverständnisse begünstigen können. Im Folgenden wird daher der Begriff der Messunsicherheit ohne überflüssige Fachausdrücke erklärt.
. (Bild: Flir Systems GmbH)")
Bild 1 | Flir-Labor für die Kalibrierung von Wärmebildkameras in Niceville, Florida (USA). (Bild: Flir Systems GmbH)
In den meisten Datenblättern von IR-Kameras werden Genauigkeitsangaben wie ±2°C oder 2% des Ablesewerts gemacht. Diese Werte sind das Ergebnis eines häufig eingesetzten Verfahrens zur Messfehlerbestimmung, der Bildung der geometrischen Summe der Einzelfehler (Root-Sum-of-Squares, RSS). Dahinter steckt die Idee, für die einzelnen Variablen der Temperaturmessgleichung jeweils die Einzelfehler zu ermitteln und aus der Summe der Quadrate der Einzelfehler die Quadratwurzel zu berechnen. Diese Berechnung klingt komplex, ist aber ziemlich einfach. Als weitaus schwieriger kann sich die Ermittlung der Einzelfehler erweisen. Diese können sich aus mehreren Variablen der typischen Temperaturmessgleichung von IR-Kameras ergeben, wie Emissionsgrad, reflektierte Umgebungstemperatur, Transmission, Atmosphärentemperatur, Reaktion der Kamera und der Temperaturgenauigkeit des Kalibrierungsgegenstands. Nachdem für die Einzelfehler aller genannter Größen plausible Werte ermittelt wurden, werden diese in die folgende Gleichung eingesetzt:
Gesamtfehler = √ΔT12+ΔT22+ΔT32 …
wobei ΔT1, ΔT2, ΔT3 usw. die Einzelfehler der Variablen der Messgleichung sind. Warum ist diese Vorgehensweise sinnvoll? In der Praxis können sich zufällige Messfehler gegenseitig verstärken, aber auch gegenseitig auslöschen. Die geometrische Summe ist deshalb das sinnvollste Maß zur Angabe des Gesamtfehlers. Aus diesem Grund wird diese Angabe in allen Datenblättern von Flir-Kameras verwendet. Grundsätzlich ist dabei zu berücksichtigen, dass die bisher diskutierten Berechnungen nur gelten, wenn die Kamera im Labor oder für kurze Distanzen (unter 20m) im Freien verwendet wird. Bei längeren Distanzen kommen zusätzliche Messungenauigkeiten aufgrund der atmosphärischen Absorption sowie in geringerem Ausmaß der atmosphärischen Emission hinzu. Wenn heute die Messunsicherheit moderner IR-Kamerasysteme unter Laborbedingungen analysiert wird, ergeben sich fast immer Werte um ±2°C oder 2%. Die Praxis zeigt aber, dass Hochleistungskameras wie die X6900sc erheblich bessere Ergebnisse als preisgünstige Kameras wie die E40 liefern.
Genauigkeiten von ±1°C oder ±1%

Bild 2 | Typische Reaktion einer A325sc-Kamera bei Aufnahme eines Schwarzen Körpers mit 37°C. (Bild: Flir Systems GmbH)
In diesem Abschnitt schauen wir uns Temperaturmessungen an, die sich ergeben, wenn eine Kamera auf ein Objekt mit bekanntem Emissionsgrad und bekannter Temperatur gerichtet wird. Objekte dieser Art werden üblicherweise als Schwarzer Körper bezeichnet. Dieser Begriff wird auch für Laborgeräte verwendet, die diesem Modell sehr nahe kommen. Zur Bestimmung der Messunsicherheit im Labor wird eine kalibrierte Kamera auf einen kalibrierten Schwarzen Körper gerichtet, und die gemessene Temperatur im Zeitverlauf aufgezeichnet. Trotz sorgfältiger Kalibrierung wird es immer zufällige Fehler bei der Messung geben. Die Genauigkeit und Präzision der gemessenen Daten kann quantifiziert werden. In Bild 2 sind die Ergebnisse der Messung eines kalibrierten Schwarzen Körpers dargestellt. Es zeigt mehr als zwei Stunden Daten von einer A325sc Kamera, die in einem Abstand von 0,3m auf einen Schwarzen Körper mit 37°C in einem Innenraum gerichtet ist. Es wurde ein Kameramesswert pro Sekunde aufgezeichnet. Dargestellt ist der Mittelwert aller Pixel des Bildes. In einem Histogramm dieser Daten wäre deutlich zu erkennen, dass die meisten Datenpunkte zwischen 36,8 und 37°C liegen. Die extremsten aufgezeichneten Werte betrugen 36,6 und 37,2°C. Angesichts dieser Ergebnisse wäre es verführerisch, eine erwartete Genauigkeit von 0,5°C für den Mittelwert aller Pixel anzugeben. Man könnte sogar ±1°C für die A325sc und alle anderen Kameras mit dem gleichen Detektor behaupten. Allerdings ließe sich einwenden, dass in der obigen Grafik der Mittelwert aller Pixel dargestellt ist, der möglicherweise nicht repräsentativ für einzelne Pixel ist. Eine Möglichkeit, herauszufinden, wie gut alle Pixel untereinander übereinstimmen, ist die Beobachtung der Standardabweichung im Zeitverlauf. Diese ist in Bild 3 zu sehen. Dieses zeigt, dass die typische Standardabweichung unter 0,1°C liegt. Die gelegentlichen Spitzen um 0,2°C sind die Folge der Ein-Punkt-Aktualisierung der Kamera, einer Art Selbstkalibrierung, die bei allen Kameras mit Mikrobolometer regelmäßig durchgeführt werden muss. Bisher haben wir die Datenerfassung durch Kameras mit ungekühlten Mikrobolometern diskutiert. Wie werden aber diese Ergebnisse einer Hochleistungs-Quantendetektorkamera abweichen? Bild 4 zeigt die Reaktion einer typischen 3 bis 5m-Kamera mit einem Indium- Antimonid-Detektor (z.B. der X6900sc). In der Dokumentation der Kamera wird eine geprüfte Genauigkeit von ±2°C oder 2% angegeben. Im Graph unten ist erkennbar, dass die Ergebnisse diese Angabe bestätigen: die Anzeigegenauigkeit am Messtag betrug ca.0,3°C und die Präzision ca.0,1°C. Aber woher kommt der Offset-Fehler von 0,3°C? Ursachen könnte die Kalibrierung des schwarzen Körpers oder der Kamera sowie einer der bereits genannten Einzelfehler sein. Denkbar wäre auch, dass sich die Kamera am Beginn der Messung zunächst erwärmt hat. Wenn sich die Temperatur der Objektive oder des Kameragehäuses ändert, kann dies zu einem Offset bei der Temperaturmessung führen. Die beiden Kalibrierungstests zeigen also, dass sowohl Mikrobolometerkameras als auch Photonen zählende Quantendetektorkameras ab Werk so kalibriert werden, dass beim Aufnehmen eines 37°C warmen Objekts mit bekanntem Emissionsgrad unter typischen Innenraumbedingungen Genauigkeiten unter 1°C erreichbar sind.
Umgebungstemperaturkompensation

Bild 3 | Standardabweichung einer A325sc, die auf einen Schwarzen Körper mit 37°C gerichtet ist. (Bild: Flir Systems GmbH)
Zu den schwierigsten Punkten bei Werkskalibrierungen gehört die Kompensation der Umgebungstemperatur. IR-Kameras reagieren auf die gesamte IR-Energie, die auf den Detektor fällt. Dies gilt auch für Quantendetektorkameras. Wenn die Kamera gut konstruiert ist, stammt die meiste Energie vom aufgenommenen Objekt und nur wenig von der Kamera selbst. Allerdings ist es unmöglich, den Beitrag des Materials rund um den Detektor und im Strahlengang vollständig zu eliminieren. Ohne Kompensation werden alle Temperaturänderungen des Kameragehäuses oder der Objektive die Temperaturmesswerte der Kamera beeinflussen. Die beste Vorgehensweise ist es, die Kameratemperatur und die Temperatur im Strahlengang an drei verschiedenen Punkten zu messen. Die gemessenen Werte werden dann in die Kalibrierungsgleichung eingesetzt. Auf diese Weise können präzise Messwerte im gesamten Bereich der Betriebstemperaturen erreicht werden (typischerweise 15 bis 50°C). Dies ist besonders bei Kameras wichtig, die im Freien verwendet werden oder schnellen Temperaturwechseln ausgesetzt sind. Auch wenn die Umgebungstemperatur kompensiert wird, sollte der Kamera genügend Zeit zum Aufwärmen bleiben, bevor kritische Messungen durchgeführt werden. Halten Sie außerdem die Kamera und die Objektive von direkter Sonneneinstrahlung und anderen Wärmequellen fern. Berücksichtigen Sie auch, dass nicht alle Kamerahersteller während der Kalibrierung die Umgebungstemperatur kompensieren. Wenn die Drift der Umgebungstemperatur nicht korrekt kompensiert wird, können die Daten signifikante Ungenauigkeiten aufweisen – mit Abweichungen von 10°C und mehr.
Weitere Einflussfaktoren
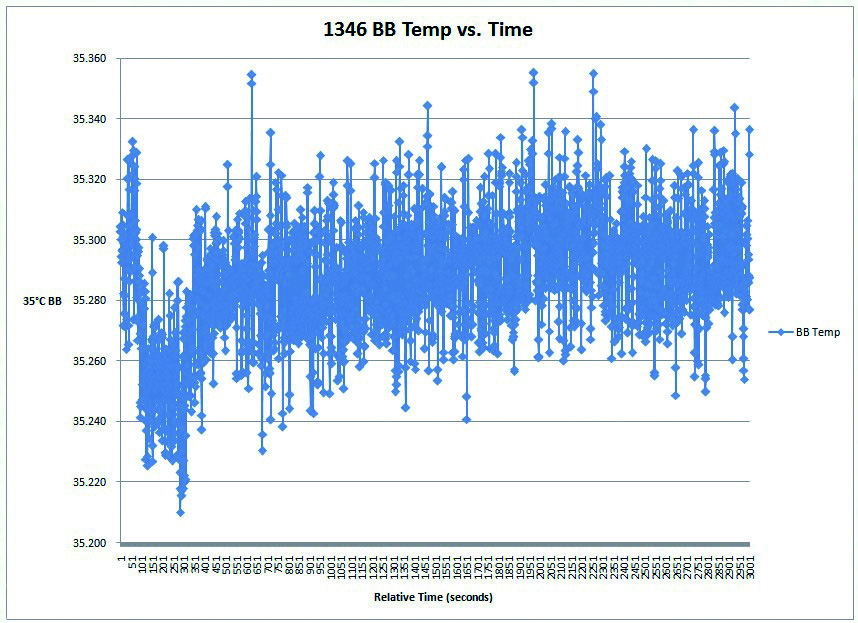
Bild 4 | Reaktion einer typischen InSb-Kamera beim Aufnehmen eines Schwarzen Körpers mit 35°C. (Bild: Flir Systems GmbH)
Auch ohne direkten Bezug zur Kamerakalibrierung können Aspekte wie Emissionsgrad und Messpunktgröße Einfluss auf die Messgenauigkeit haben. Eine fehlerhafte Einstellung des Emissionsgrads oder ungeeignete Messbedingungen können die Messergebnisse der Kamera beeinflussen. Der Emissionsgrad – also die Fähigkeit eines Objekts, IR-Energie zu emittieren, statt zu reflektieren – muss berücksichtigt werden. Stellen Sie fest, ob das Objekt möglicherweise vollständig reflektiert, und ergreifen Sie gegebenenfalls vor Beginn der Messungen entsprechende Gegenmaßnahmen (z.B. Beschichtung der Oberfläche mit nicht-reflektierender Farbe). Alle Flir-Kameras sind mit Optionen zur Festlegung des Emissionsgrades ausgestattet. Wenn Ihnen ein Fehler unterlaufen ist, können Sie mit der R&D Software während der Analyse den Wert für den Emissionsgrad ändern (Echtzeitanzeige oder nachträgliche Analyse). Dies ist sowohl für das gesamte Bild als auch für einzelne Bereiche möglich. Ein weiterer Faktor ist die Messpunktgröße, also die Größe der Objektfläche, die von jedem einzelnen Pixel erfasst wird. Nehmen wir einmal an, dass Sie mit einer A325sc mit 25-Grad-Standardobjektiv ein brennendes Streichholz in 18m Entfernung aufnehmen. Jeder Pixel erfasst 6,5cm2 der Gesamtszene. Ein Streichholzkopf ist jedoch nur 0,8cm2 groß – viel kleiner als der Pixel, mit dem er erfasst wird. Fast die gesamte IR-Energie, die auf den Pixel trifft, stammt also aus dem Bereich hinter dem Holzstück. Nur 1/64 der Energie kommt aus dem Holzstück, das wir eigentlich messen wollten. Hat der Hintergrund Raumtemperatur, wird die Kamera einen deutlich zu niedrigen Wert für die Streichholzkopftemperatur messen. Zur Lösung dieses Problems könnten Sie ein Teleobjektiv auf der Kamera montieren oder einfach den Abstand zum Objekt verringern. Durch beide Vorgehensweisen könnte erreicht werden, dass der Streichholzkopf den gesamten Pixel ausfüllt. Für eine bestmögliche absolute Temperaturgenauigkeit müssen Sie sicherstellen, dass das kleinste relevante Objekt mindestens von 10×10 Pixeln erfasst wird. Aber auch Messpunktgrößen von einem einzelnen Pixel oder von 3×3 Pixeln führen zu nahezu korrekten Ergebnissen.
*Die Bilder zeigen eventuell nicht die tatsächliche Auflösung der Kamera. Alle hier enthaltenen Bilder dienen nur zur Veranschaulichung.










