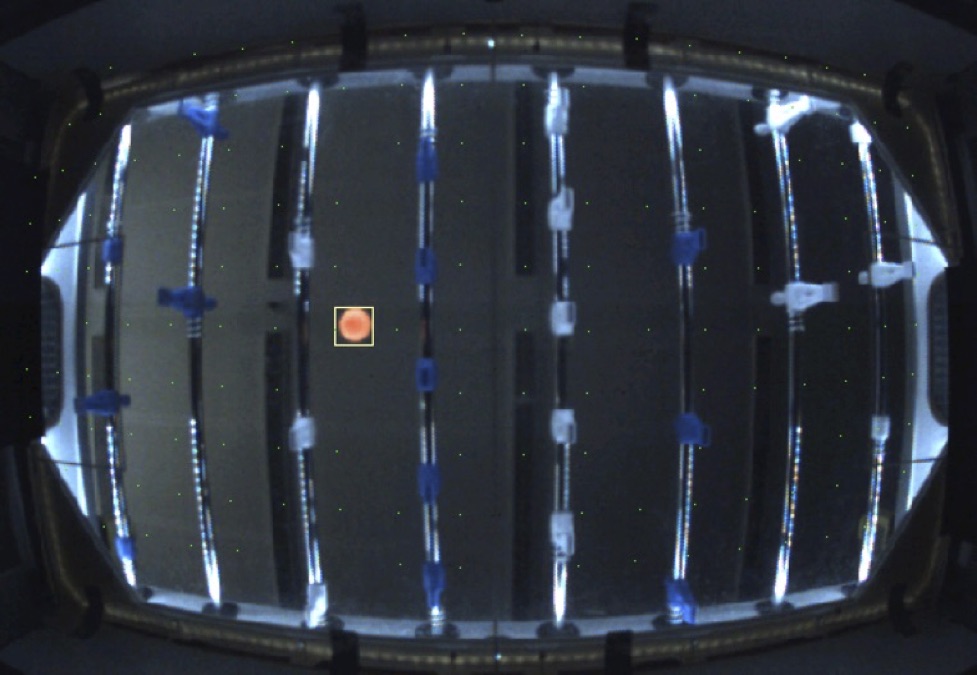
Das Roboter-System ist in der Lage die Position des Balls auf dem Tisch zu bewerten, eine Torstrategie zu entwickeln, den Gegenspieler zu analysieren und diesen im Wettkampf zu besiegen. Leistungsverbesserungen konnten auch bei der Ballkontrolle erzielt werden und darüber hinaus in dem Entwickeln von neuen Spielstrategien. Dies alles ist durch die Implementierung einer Ximea xiQ Highspeed-Kamera möglich. Die Kamera ist unter dem Tisch positioniert und zeichnet 500fps auf, um die Grundlage für die Erkennung des Balls in Echtzeit zu schaffen. Die Bilder werden dann von dem Roboter analysiert, verarbeitet und daraus resultierende Befehle an Präzisionsmotoren weitergegeben, welche die Spielerstangen steuern. Nach dem aktuellen Entwicklungsstand ist der Roboter in der Lage jeden menschlichen Gegenspieler zu schlagen.
Projekt Baby-foot
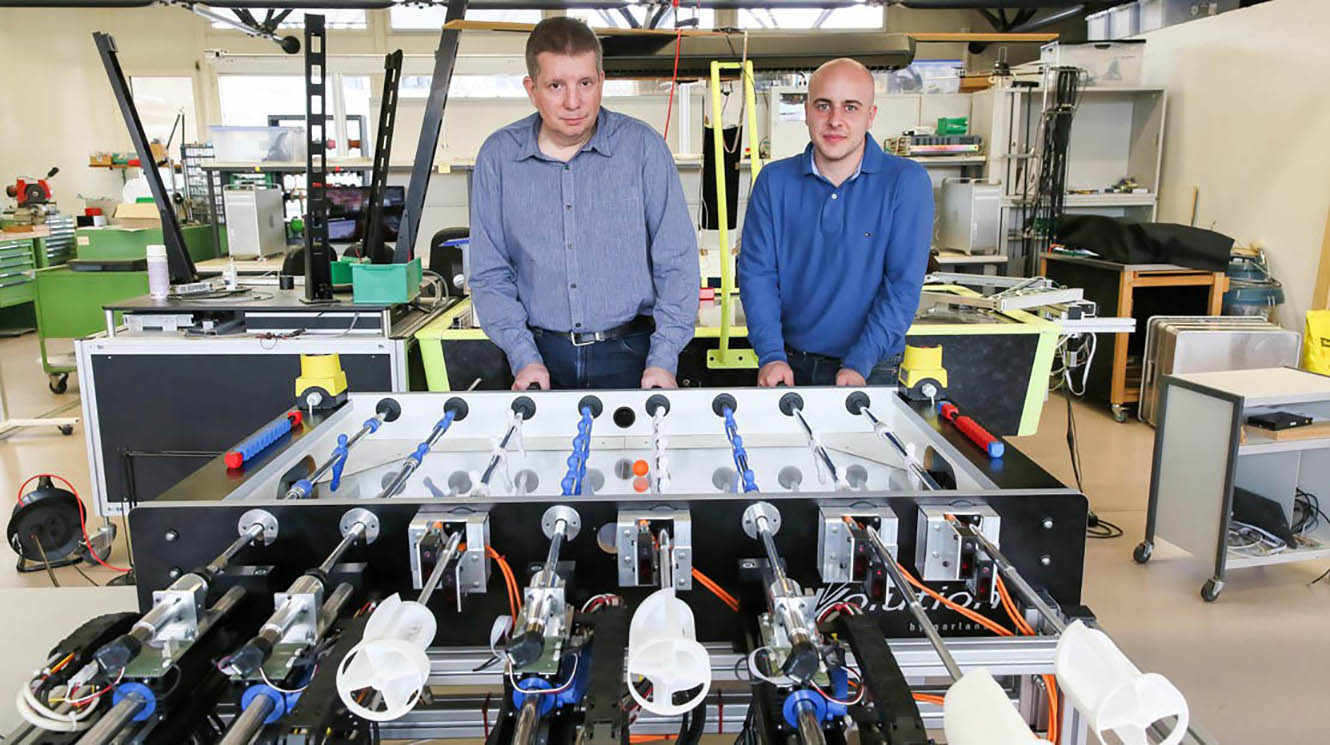
Das Projekt ‚Automatische Steuerung Baby-foot‘ ist ein Projekt der EPFL. Auf den ersten Blick sieht der Tischkicker, welcher sich im Labor für automatische Steuerung befindet, völlig normal aus. Allerdings werden die Spielerstangen der Robotermannschaft durch mechanische Arme bedient, welche den Ball in das gegnerische Tor mit einer Geschwindigkeit von 6m/s befördern können. „Das ist bereits genug, um einen Durschnittspieler zu übertreffen“, sagt der Forscher Christophe Salzmann, der Betreuer des Projekts. Das Projekt dauert mittlerweile über zehn Jahre. Im Herbst 2012 erfolgte der Startschuss, als verschiedene Studenten für ein Semester das Projekt Baby-foot ins Leben riefen. 2013 folgte die Integration von Kameras, welche die Grundlage für die Ballpositionserkennung mittels Lasermessung darstellte. Ab 2015 verlagerte sich die Aufmerksamkeit der Studenten auf die Verbesserung der Spieltaktik: schnelle Positionierung, korrekter Informationsfluss an die Motorsteuerung und die Messung der Leistung der menschlichen Gegner. 2016 und 2017 wurde an der Bildverarbeitung und den Strategie-Systemen gearbeitet, bei denen sich die Studenten auf die Ballkontrolle und -position konzentrierten. Dies wurde bis 2019 weitergeführt. Während dieser Zeit wurden Systeme zur Bildkalibrierung, Ballkontrolle und -erfassung entwickelt, eingemessen und schließlich getestet. Im Folgenden wird die visuelle Erfassung der Ballposition dargestellt.
Ballerfassung per Kamera
Zweifellos ist eine der erforderlichen Fähigkeiten, um ein Spiel am Tischkicker zu gewinnen, die Fähigkeit den Ball während des Spiels abzufangen, zu kontrollieren und zu verwalten. Die Roboterarme sind von zwei Algorithmen auf einem Computer abhängig: Einer zur Steuerung der mechanischen Bewegung des Arms und der Andere zur Verfolgung der Ballposition. Ein Ziel des Projekts ist es, die automatisierten Kontrollarme zu verbessern, indem der Ball abgefangen wird und statisch im Ballbesitz bleibt. Dazu muss die Ballgeschwindigkeit, die Position und die Dämpfung berechnet werden, um die mechanischen Arme zum Abfangen des Balles im Voraus zu bewegen.