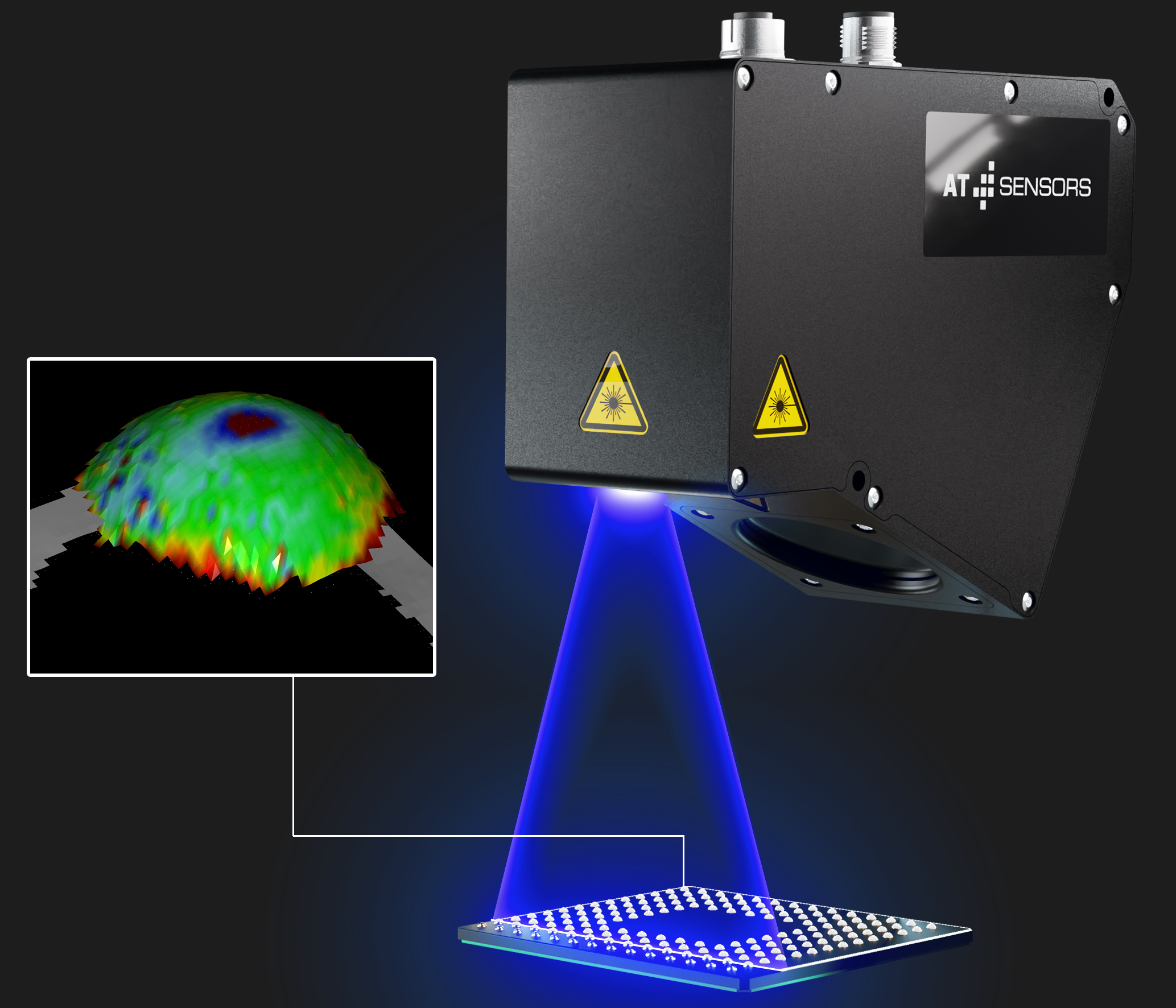
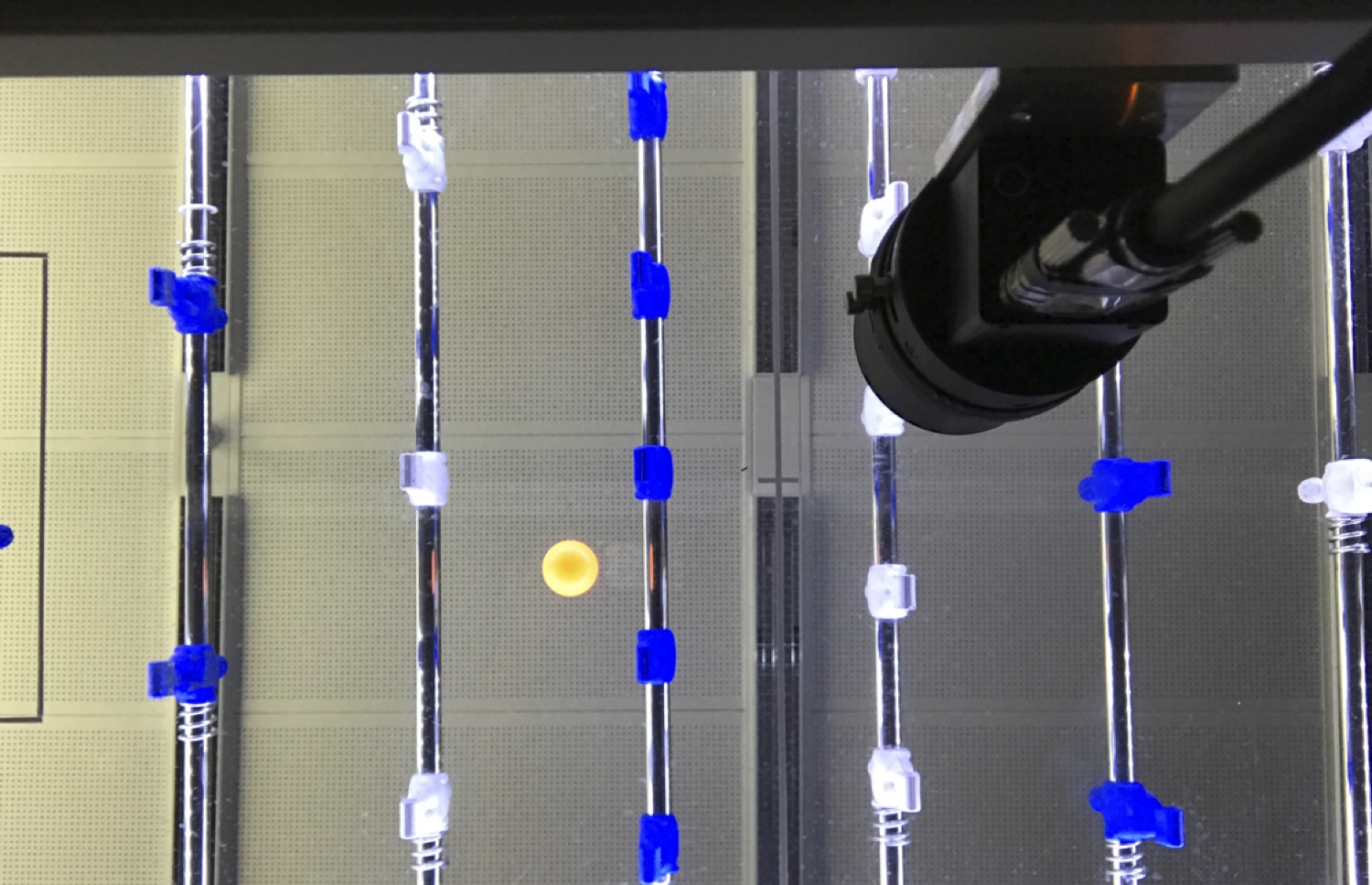
Bei der derzeitigen Umsetzung hat die Bilderfassung eine enorme Rolle auf die Ermittlung der Ballposition gespielt. Um sich richtig zu positionieren, muss der Roboter in Echtzeit eine klare Vorstellung von der Lage des Balles haben. Die Studierenden ersetzten daher den Boden des Tischkickers durch ein transparentes Material und platzierten Ximea Highspeed-Kameras unter dem Boden, um die Spielfläche zu filmen. Das Ball-Vision-System stützt sich auf die Bilder, die von einer Ximea xiQ-Kamera mit einer Auflösung von 648×488 Pixeln und 500fps erfasst werden. Wenn die Algorithmen bei angeschlossener Kamera am USB3-Port ausgeführt werden, ist es möglich, eine Verfolgungsrate zwischen 400 und 500Hz zu erreichen, d.h. dass unter normalen Bedingungen alle 2,5m/s eine neue Ballposition aufgezeichnet wird. Ein Profispieler kann den Ball bis zu 15m/s bewegen, folglich erhält der Roboter alle 37mm eine Messung. Die Studierenden erreichten bei dem Versuch, so schnell wie möglich zu schießen, Geschwindigkeiten von etwa 3m/s, folglich erhielten sie alle 7,5mm Messungen. Der Abstand zwischen den Spielerstangen beträgt 150mm. Mit den gegebenen Daten ist es theoretisch möglich, die genaue Geschwindigkeit des Balls zu berechnen und seine Position vorherzusagen, bevor die nächste Spielerreihe erreicht wird.
Fazit
Der Roboter-Tischkicker ist bereits seit mehreren Jahren im Einsatz, aber die jüngsten Aktualisierungen haben dem System einen Geschwindigkeits-, Genauigkeits- und Leistungsschub verliehen. So sehr, dass die Studenten der EPFL damit rechnen, dass menschliche Spieler mit einem durchschnittlichen Können regelmäßig vom Roboter-Kicker geschlagen werden.
www.epfl.ch
www.ximea.com